





码垛机器人结构的研究和瞬态动力学分析
时间:2017-12-06
阅读:9940

3码垛机器人瞬态动力学分析
瞬态动力学分析方法是机械机构随着时间的变化载荷结构动力学响应的一种方法。同静力学不一样的是,瞬态分析重点研究伴随着时间改变,负载、阻尼及系统惯性改变状况。在稳态载荷、简谐载荷和瞬态载荷随意组合作用下,确定机构的位移、应力以及应变和时间的相关程度。瞬态动力学的基本公式为:

在分析码垛机器人的瞬态动力分析,首先将通过三维绘图软件Solidworks构建的装配整体或零件模型加载到Workbench内部,根据运行的状态,分析其中关键机构在某些危险工况下的瞬态动力学分析,从而得到应力、应变随时间的变化,在ANSYSWorkbench用云图表示。
码垛机器人在作业过程中,随着频率的不同,各个部分机构所承受的力是不同的,在这里分析两种极端情况大臂小臂的瞬态动力分析。一种码垛机器人搬运货物时,大臂与小臂连接处完全展开,此时当小臂与大臂连接处轴销开始启动,此时小臂收到最大力作用;另一种是大臂与腰部连接处完全展开,此时大臂与腰部机构连接处轴销开始启动主,此时大臂收到最大力作用。
对于第一种情况,由于臂部启动是存在加速度,此时加速度为20m / s2,所受到的力的作用与静态时一样。所采用的材料为4_5号优质碳钢,得到的小臂应变图、应力图以及总应变图如图_5.18-图_5.20所示。
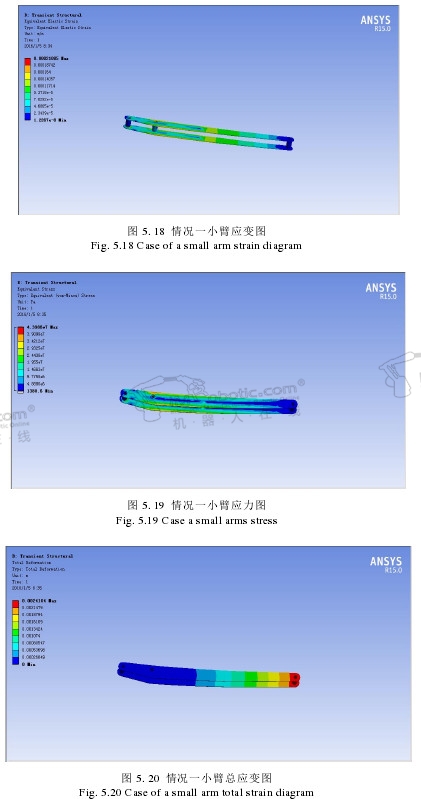
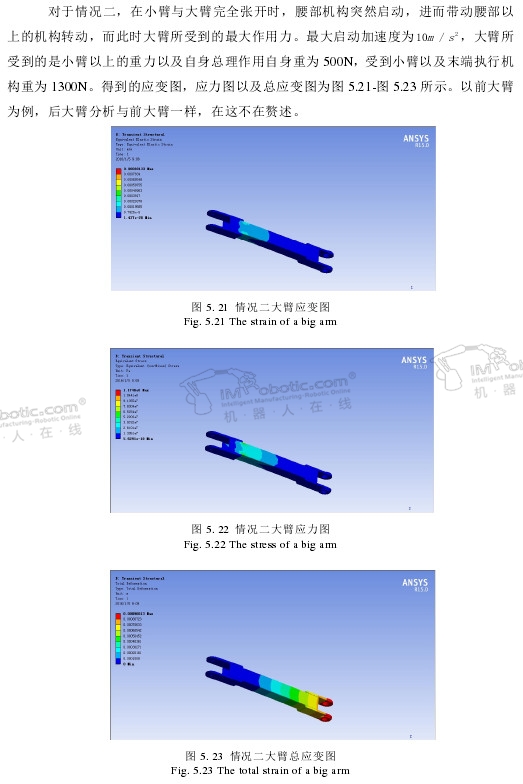
综上两种情况可知,第一种情况小臂所受的最大应力为43.98MPa,所受的应变以及总应变分别为0.187mm和2.1_Smm;第二种情况前大臂所受的最大应力为117.46MPa所受到的应变以及总应变最大为0.881mm和0.908mm。根据4_5度优质碳钢材料属性可知,是符合要求的。
本章节主要码垛机器人的关键零件有限元分析,这部分主要是在ANSYS Workbench中实现的。首先对此软件进行了简单的介绍,从而明白软件的功能;其次,对码垛机器人的大臂、小臂以及四个关键受力的销轴进行了动力学分析,得到了相应
的等效应力云图、等效应变云图以及总应变云图;最后,本章对码垛机器人的瞬态动力学进行了分析,在不同的工况下,各机构所受到的应力、应变存在差异,得到等效应力云图以及等效应变云图。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









