





码垛机器人虚拟样机模型的建立
时间:2017-12-07
阅读:7937

机器人刚柔藕合动力学模型验证与分析
1机器人虚拟样机模型的建立
为了验证动力学模型的准确性,本文采用Adams建立机器人的虚拟样机模型,并对机器人进行动力学分析。
首先将机器人的Solidworks三维模型导入至Adams中,忽略螺钉、垫片等对系统影响较小的零件,仅保留伺服电机外形结构,简化各轴RV减速机,之后在各轴添加相应的约束、运动副及驱动(特别地,在三个电机轴处添加扭簧力以模拟关节柔性),最后在末端添加130kg载荷,即完成了对机器人虚拟样机模型的建立,如图2-4所示。
.jpg)
同时,根据式(2-6), (2-14)所得结果,在Matlab中编辑程序,实现对机器人刚体动力学及刚柔祸合动力学方程的求解,通过与Adams中虚拟样机模型的仿真结果进行对比来验证模型建立的准确性。
2动力学模型验证及柔性影响分析
为了对动力学模型进行验证,首先需要设计测试轨迹,然后对在相同轨迹下的动力学求解结果进行对比。测试路径如图2-5所示。
.jpg)
根据上述测试轨迹,使用Matlab对刚体动力学及刚柔祸合动力学进行求解,同时使用Adams对测试轨迹进行仿真分析,对比结果如图2-6、图2-7和图2-8所示。
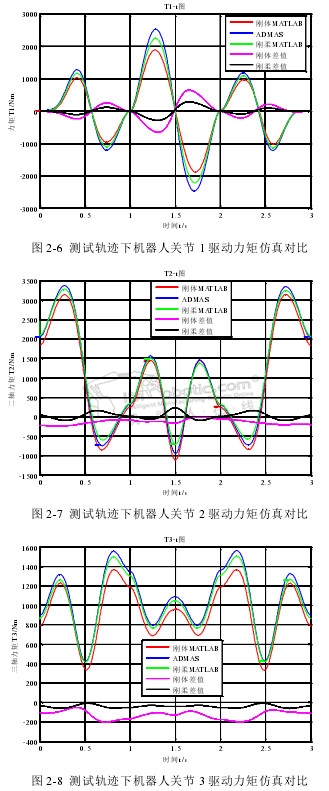
通过对比可以看出,刚体动力学模型与刚柔祸合动力学模型的仿真结果与Adams仿真结果总体趋势基本一致,模型建立基本准确。但是在速度及加速度较大处,结果差异较大,1轴力矩的刚体动力学最大误差为15.71%,刚柔祸合动力学最大误差为3.33%, 2轴力矩的刚体动力学最大误差为_5._51 %,刚柔祸合动力学最大误差为4.32%, 3轴力矩的刚体动力学最大误差为12._5 %,刚柔祸合动力学最大误差为3.13%。显然,刚柔祸合动力学模型更精确,更接近于实际情况,说明柔性的存在对系统动力学的影响确实不容忽略。存在数值上偏差的主要原因是在刚体动力学模型及刚柔祸合动力学模型建立时并未考虑到三轴电机质量以及转动质量的影响。
此外,可以看到,由于2, 3轴的重力项与位置有关,所以在机器人启停时的驱动力矩并不为零,这一方面对电机启停时的性能提出了更高的要求,另一方面,也会影响到机器人运动过程中的总能耗,所以考虑在进行轨迹规划时对机器人运动的始末点进行优化,实现真正的能耗最优轨迹规划。
本章首先利用机器人双平行四边形结构的几何特性,运用几何法建立了机器人的正、逆运动学,求导后推导出了雅可比矩阵,建立了关节空间与笛卡尔空间下位移、速度之间的关系,利用Matlab绘制出机器人工作空间在XoZ平面下的投影。之后通过对机器人质心位置的更准确的计算,利用第二类Lagarange方程建立了更为精确的机器人的刚体动力学方程。然后,对关节柔性加以考虑,将机器人关节等效为扭簧模型,建立了机器人刚柔祸合动力学模型。最后,设计测试轨迹,通过Adams建立虚拟样机模型对建立的模型进行测试,验证了模型建立的准确性。本章对运动学及动力学模型的建立为后续的轨迹规划及控制系统的设计工作打下了基础。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









