





码垛机器人控制系统设计
时间:2017-12-08
阅读:8670

码垛控制系统设计
1控制系统需求
1控制系统功能需求
根据第二章描述的码垛生产线实际结构和各机构实现的功能以及工业现场的要求,码垛机器人控制系统应具备如下功能:
(1)自动复位功能
在码垛机运行的时候,码垛机器人要完成相应的码垛任务,就需要抓取位置以及码垛位置的位置坐标,而该坐标点所在参考坐标系是建立在码垛机构当中,当系统发生断电、停机或发生故障时,为了防止系统丢失参考坐标点,因此系统应当具备自动复位功能;
(2)不同产品不同垛型
码垛系统应当具备在针对不同的产品时,根据产品的尺寸、重量、形状等因素,能够进行相应垛型的选择和码垛的功能;垛型的不同,每次抓取和堆垛的产品的个数也是不一样的,如图3-1所示,为两种常见的垛型:
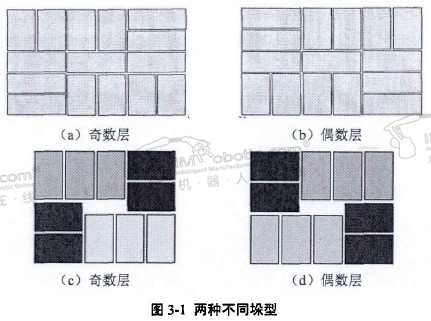
上面4幅图就是两种不同类型的码垛垛型,关于垛型的具体选择,主要根据工业现场的产品尺寸、码垛托盘尺寸以及现场的实际要求等因素,来计算出与产品相适应的垛型,这是进行码垛工作的基本条件;
(3)末端执行机构可更换
末端执行机构,也就是夹爪或者吸盘,这是上面提到针对不同类型产品时所要进行更换的,以保证码垛机可针对多种产品进行码垛;
(4)故障诊断功能
码垛机器人在现场工作时,还应当具备故障诊断的功能,也就是常说的故障报警和诊断,只有具备了良好的故障诊断功能,才能真正保证整个系统在实际运行过程中的安全性和稳定性,同时故障诊断功能也是帮助操作人员和用户及时、准确地发现问题,并排除故障,是系统正常运行的必要因素
2控制系统技术要求
根据实际情况和要求,码垛控制系统应具备以下几项功能:
(1)生产率:单码垛产能将达到810^' 850箱/小时;
(2)垛型:可选择不同的垛型,文中举例以24垛型为例,既24号箱子:长×宽×高 (cm):345 ×204×115;
(3)控制精度:根据码垛项目实际要求,其精度要求在±1mm;
(4)不同产品:根据不同类型的产品采用相应的末端执行机构,完成相应码垛工作。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









