





移载码垛机器人控制系统改进方案设计
时间:2017-12-11
阅读:6992

控制系统改进方案设计
基于第三章中所描述的移载码垛机器人控制系统方案,并针对系统中仍存在的两点主要问题,对控制系统提出相应的改进设计。
原码垛控制系统为开环式运动控制,而闭环运动控制系统才是控制系统发展的趋势;为了实现精准的定位、抓取和搬运功能以及智能化的控制要求,所以需要对原有控制系统进行相应的改进,从而实现由开环运动控制向闭环运动控制的转变。机器视觉作为如今兴起的一项重要发明,已经被广泛应用于各行各业,将机器视觉应用到码垛控制系统当中,即可实现运动控制的闭环反馈,还能够提升码垛机器人的智能化,使得移载码垛运动控制系统更加完善并更具适应性。因此我们将机器视觉引入控制系统中,同时将编码器与光栅尺传感器应用于控制系统中,用于保证运动控制的精确定位和实现当前位置信息的反馈,保证闭环控制系统运动的准确性与稳定性。
1 机械视觉系统
1 机械视觉系统概述
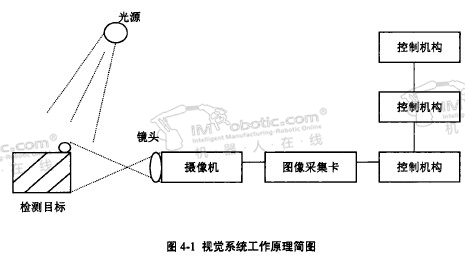
机械视觉作为智能化的一项重要研究成果,己被广泛应用到诸多场合之中。机器视觉就是利用摄像机的功能,使机器具备人眼所具备的能力,对目标进行测量和判别。机器视觉系统利用图像拍摄设备,例如CMOS, CCD, USB等)将所拍摄的目标图像转换为相应的信息数据,而后传送到专业的图像处理软件,分析处理获取目标图像的相关信息,根据图像上的像素、亮度、灰度分布等信息,转换为数字信号;图像处理软件对所获取的信息进行分析和处理来获取所需的目标特征,并依据其特征信息控制执行机构运动
机器视觉有利于提升整个系统的自动化与柔性功能。并能够在一些不适宜人类工作的环境中进行工作;关于大批量生产线上的检测工作,能够取代人工检测,并且具有更好的效率与更高的精度。机器视觉工作的基本原理如图4-1所示:

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









