





移载码垛机器人基于Labview的标定方法
时间:2017-12-11
阅读:11000

移载码垛机器人基于Labview的标定方法
1 基于Labview的标定方法
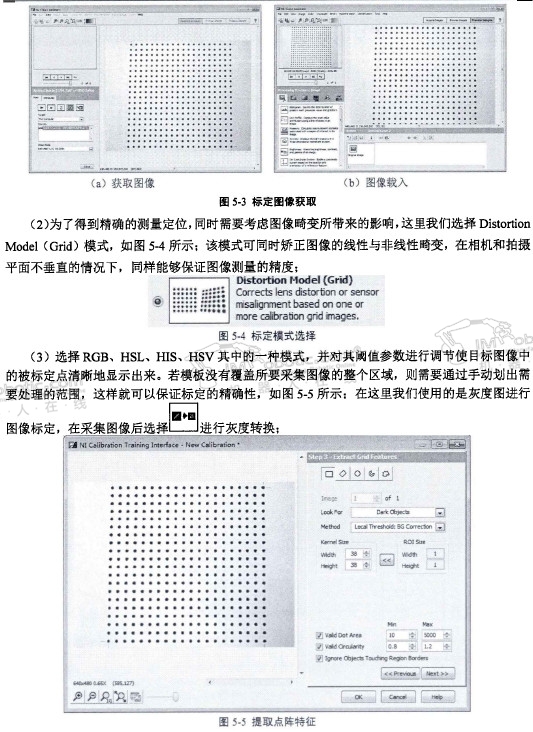
在这里我们通过Labview视觉平台建立机器视觉系统,利用Labview中的视觉助手实现对相机的标定,相较于上述传统标定方法的繁琐,基于Labview的标定方法则显得更加贴合实际应用,该方法是通过一块标准的标定模板来提供标定时所需要的信息,此标定模板之上的相关信息全是已知的,并且能够保证精度,因此使用该模板的图像进行标定。根据标定结果与Labview视觉模块中的相关算法,即可获取目标图像中特征点的精确坐标;该标足方法使得标定的难度减小,并且能够保证精度。
1 标定模板
所选用的标定模板为Labview软件中所提供的标准标定模板,该标定模板为点阵标定板,其上的圆点的特征信害、明显,标定模板如图}-2所示;模板中每个圆点的半径以及两个相邻圆心之间的距离是己知的;其中原点半径是2mm横向与纵向相邻两个圆心之间的距离是1cm。
2 标定过程
使用Labview视觉平台需要安装Labview最新视觉组件(Vision Development Module 2013和NI vision Builder for Automated Inspection 2013),相对于之前的版本,新版本的Labview中的VBAI模块,其中包含了机器视觉所需的图像获取、预览和图像处理所用到的大部分算法函数,配置了专门的标定程序模块,即Calibration Training,通过此模块可以方便快捷地完成相机的标定任务,其标定结果以png的文件格式保存下来。
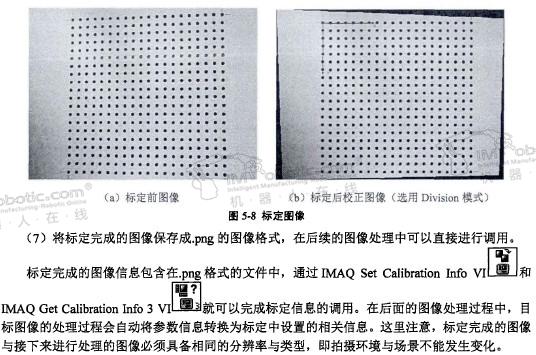
(4)标定模板参数设置,在这里需要输入标定模板的相应参数,有X Spacing Y Spacing以及Unit,分别表示在X方向与Y方向上两个相邻圆心之间的距离以及单位;其中X和Y方向相邻两点距离均为10mm,其设置如图5-6所示:
通过接下来视觉应用的验证:该标定方法完全可行,且操作过程方便。为视觉系统的后期开发提供了便利。基于Labview的标定能够有效消除线性和非线性畸变引起的图像畸变,同时可以利用视觉模块中的相关图像处理程序获取图像的特征信息,这些功能都是传统标定方法所难以达到的。应用基于Labview的视觉系统,能够有效的提升工作效率,缩短产品开发周期。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









