





码垛机器人关节空间轨迹规划
时间:2017-12-13
阅读:9398

码垛机器人关节空间轨迹规划
基于fminimax算法的关节空间轨迹规划
在关节空间中进行运动轨迹规划,既不需要知道笛卡尔空间具体的运行轨迹,又可以有效地避开奇异性问题,体现出了算法的高效性和实用性。
单纯采用fminimax算法来规划关节空间轨迹,只考虑角速度、角加速度和角加加速度作为约束条件,最终码垛机器人运行时间会达到最优目标,但是机器人在笛卡尔空间轨迹路径只通过预设的关键点,但是整个轨迹是无规则的,不仅不满足码垛机器人实际码垛时候的轨迹路径,而且会对装载货物后的码垛机器人产生很大的冲击力,导致机器人本体振动从而减少其使用寿命。
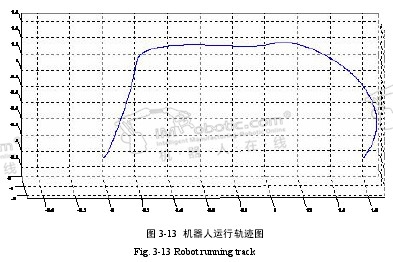
由图3-13可以看出,纯粹采用优化算法在关节空间规划轨迹,虽然可以达到时间最优,但是路径不能保证完全合理,当码垛机器人装载货物时候会产生一定冲击力及振动,不利于实现实际码垛工作需求。
基于模式搜索算法的时间最优轨迹规划
在关节空间轨迹规划方案中采用三次样条曲线和模式搜索算法相结合的方法,既可以保证角速度和角加速度连续,又可以实现角加加速度的阶跃在预期范围内。本文将各个关节的。ω、acc和jerk作为约束条件,提出了将模式搜索法用于机器人时间最优轨迹规划的方法,从而规划出了满足码垛需求的时间最优轨迹。这种方法的优势在于既满足约束条件以及关节轨迹平滑要求,同时能够保证笛卡尔空间的精度和机器人拥有理想的运行轨迹。
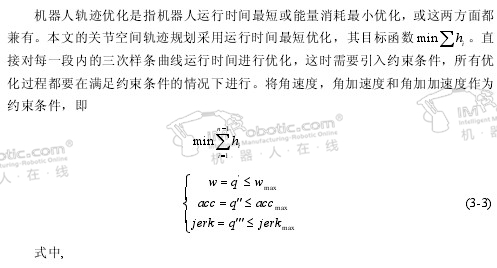

保证角速度ω和角加速度acc连续,而角加加速度jerk无需连续,只要小于最大jerk限制即可。
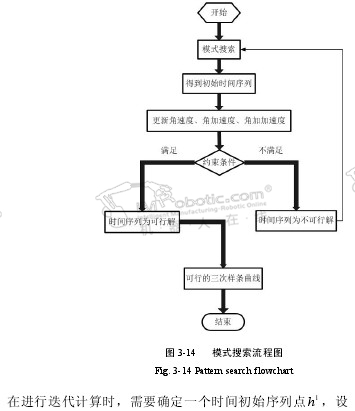
为了达到时间最优这个目标,采用模式搜索法来优化机器人运行时间。由于本文机器人关节角度采用的是三次样条曲线拟合方法,三次样条曲线形式简单,阶数较低,通过模式搜索法可以快速得到最优时间。
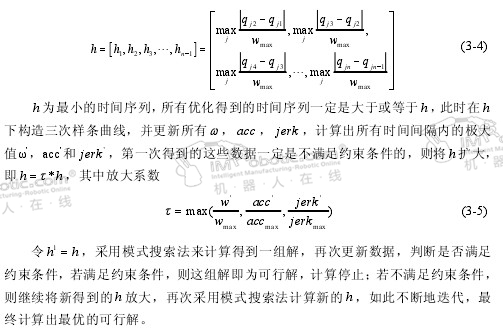
模式搜索法一般用于解决无约束最优化问题,而关节空间规划需要考虑约束条件的限制,所以采用该方法优化得到所有的时间序列后,在这些新的时间序列下更新所有的角速度,角加速度和角加加速度,计算新的三次样条曲线,判断各值是否
满足约束条件,若满足条件,则此时间序列即为可行解,若不满足约束条件,则需要重新确定初始解,并再次带入模式搜索法中来计算新的时间序列。如此不断地迭代,从而得到最优解。
通过上述方法得到最优的时间序列,并且由于模式搜索法是针对三次样条曲线来优化得到的,所以新的最优时间序列同时对应着新的相应的各个关节角度值,各个电机在相应的时间序列下获得相应的关节角度,机器人就可以运行出时间最优轨迹。
本章主要介绍了码垛机器人基于关节空间和笛卡尔空间的轨迹规划方案,阐述了笛卡尔空间中采用样条曲线拟合轨迹的弊端,同时提出了相关改进方案,在关节空间中采用模式搜索法不断优化机器人运行时间,不仅保证机器人的运行轨迹,而且能够实现最优时间的目标,与此同时也提出了基于矢量合成的逼近算法,可以实现避障,圆弧过渡等功能。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









