





码垛机器人轨迹规划实验及对比分析
时间:2017-12-13
阅读:8537

码垛机器人轨迹规划实验及对比分析
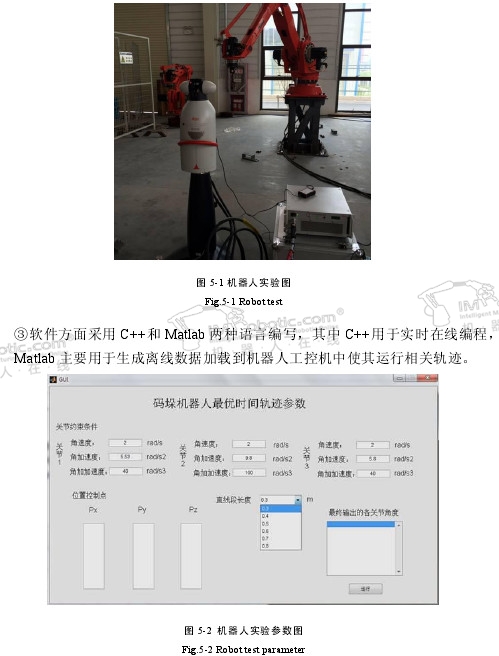
进行轨迹规划相关实验时,首先需要搭建相关实验平台,本实验平台包括以下几个部分:
①码垛机器人本体及加工的法兰盘。
②Leica AT901-B激光跟踪仪及配套测量软件,用于测量机器人实际位置坐标。
(一)笛卡尔空间轨迹规划实验
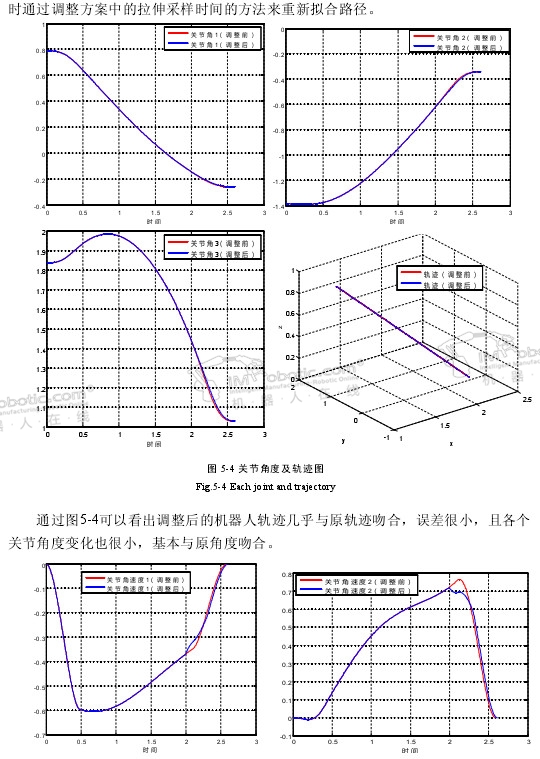
在笛卡尔空间中采用五次样条曲线来拟合路径,起点坐标:x1=1.110360;y1=1.117193; z1=0.974503;终点坐标:x2=2.088429; y2=-0.555555; z2=0.159700;笛卡尔空间中设定角速度约束:1,设定角加速度约束:4,得到运行总时间:2.58800实验结果如下:

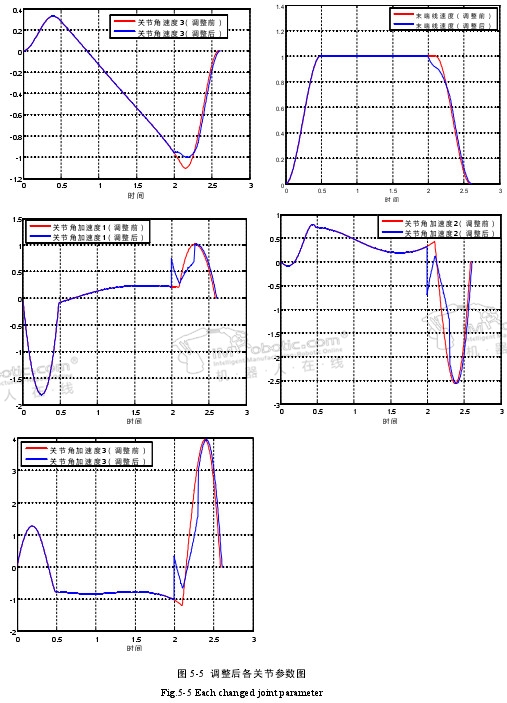
由图5-5可以看出经过调整后,机器人各关节运行效果良好,能够满足笛卡尔空间轨迹规划的要求,从而证明了本方案的可行性。
(二)关节空间轨迹规划实验
码垛机器人在进行码垛时,它的简单路径一般分为三步:提起,过渡,放下。一般在提起货物和放下货物阶段,尤其是需要叠堆的箱体,对路径线型精度的要求非常高,且要始终保持走直线。若这两个阶段在任务空间来规划,中间过渡段在关节空间规划,能够很好地保证提起和放下货物的路径为直线,且精度高,但是同样带来了一个问题,机器人在走这两段直线路径时候,花费的时间太长,整个工作效率就会比较低。
采用本文的模式搜索与三次样条曲线相结合的方法,它的优势在于只要在需要保持直线的路径段内插入足够的点,过渡段插入一些必要的参考点或避障点,在满足约束条件的情况下对时间整体优化,最终得到一个时间最优解。本文提到的码垛机器人经过重新调整电机驱动器之后,其约束条件同时被放大,约束条件如表5-1所示。
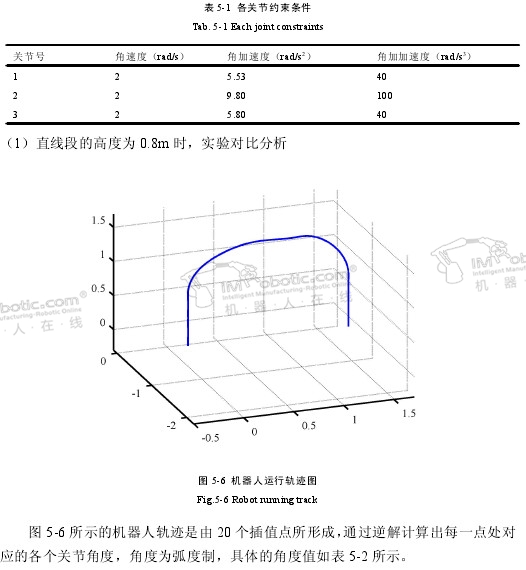

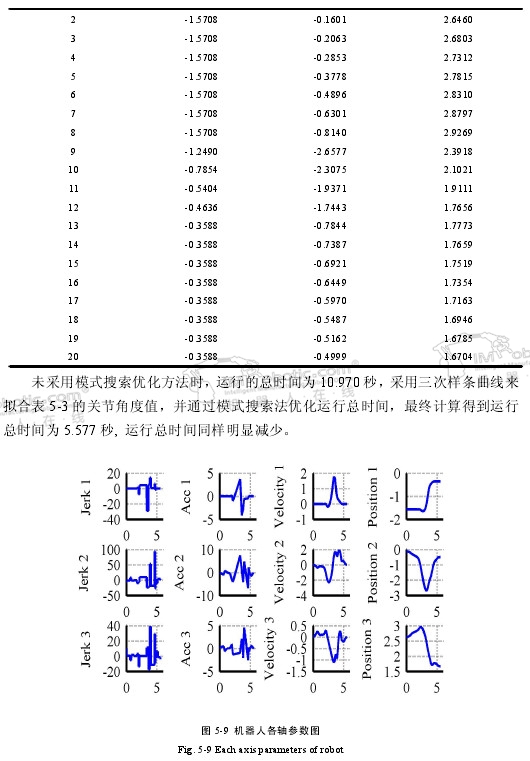
未采用模式搜索优化方法时,运行的总时间为6.648秒,采用三次样条曲线来拟合表5-2的关节角度值,并通过模式搜索法优化运行总时间,最终计算得到运行总时间为4.666秒,可以看出,运行总时间明显减少,效率得到提高。
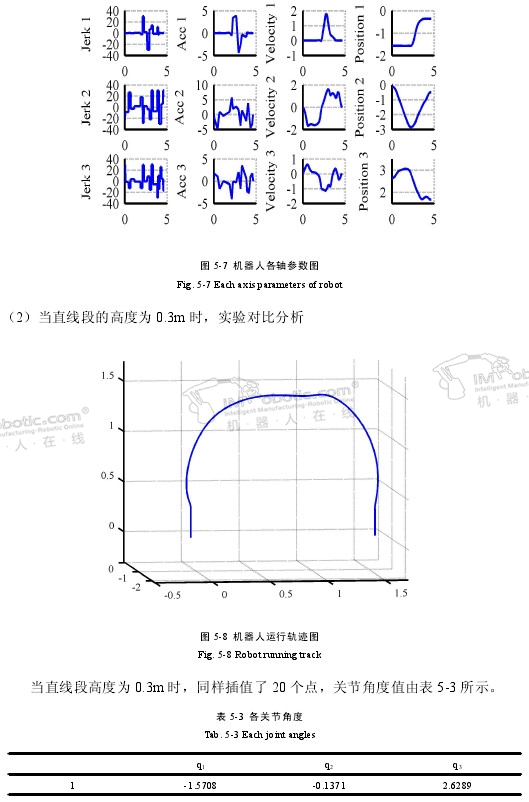
由图5-7可以看出,采用该优化方法最终得到的各个轴的角速度,角加速度和角加加速度满足约束条件,并且可以看出角速度和角加速度保持连续,这样机器人在运行时候轨迹光滑且不会产生额外的冲击力,从而也延长了机器人的使用寿命。
从以上两种情况可以看出,当在直线段插入相同个数的位置点时,直线段越短,机器人运行消耗的时间越长。针对这种现象,可通过动态调整实际插值点的数量来优化运行时间,通过在机器人本体上进行实验测试,每0.1 m插值一个控制点,最
终既可以保证直线段的线型与精度,又可以减少机器人运行时间,提高工作效率。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









