





码垛机器人标定实验及数据分析
时间:2017-12-13
阅读:9735

码垛机器人标定实验及数据分析
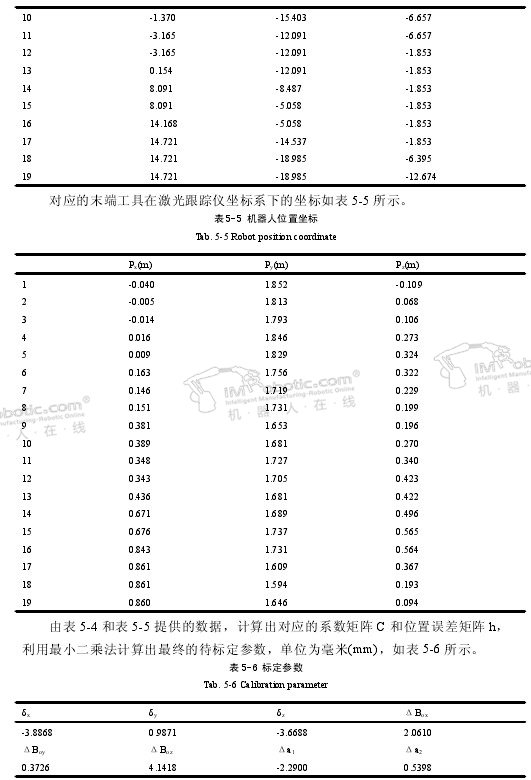
标定实验中码垛机器人本体和激光跟踪仪的位置关系如图5-10所示。
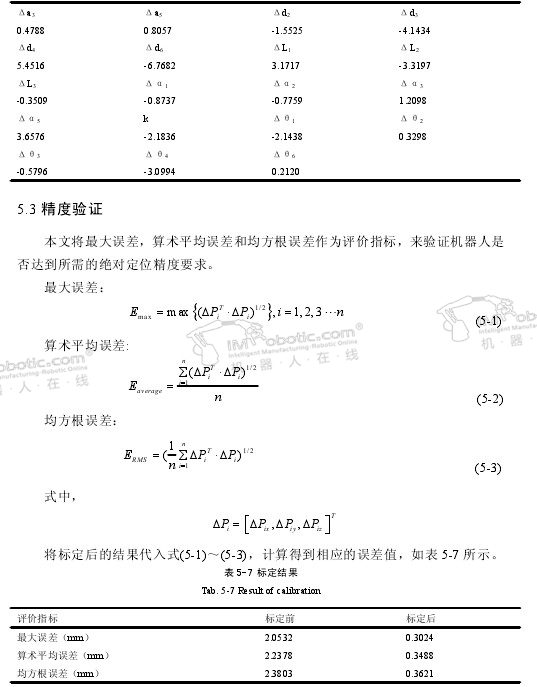
由表5-7可见,最终经过标定后的最大误差较未标定时改善了85.27%,算术平均误差改善了84.41,均方根误差改善了84.79%,从而证明了采用本文的方法能够显著提高机器人的绝对定位精度。
本章以最优时间作为最终的性能评价指标,并在满足各种约束条件下进行机器人轨迹规划,提出了两种轨迹规划方案:基于笛卡尔空间,基于关节空间,并且分别做了相关实验并分析,由于在笛卡尔空间规划有其局限性,所以为实现时间最优这个目标,在关节空间规划方案中采用模式搜索算法,最终通过现场调试实验以及数据分析,可以看出当TR-F 120机器人采用该方案后,其工作效率得到显著提升,从而证明了该方案的可行性和优越性。对于本文提出的标定方案,有如下特点:
(1)在标定方法中考虑机器人安装平面的不平度,有助于降低机器人对实际安装平面的水平精度要求,且可以保证绝对定位误差处于合理范围。
(2)将D-H参数中的所有运动学参数都进行标定,虽然理论推导相当复杂,但是绝对定位精度得到明显改善,且优于只考虑某一两个运动学参数的精度。
(3)采用本文的标定方法及高精度的激光跟踪仪,通过测量、数据处理及分析后,可以看出采用本文提出的标定方法标定后的机器人绝对定位精度误差明显减小,计算结果满足实际工作过程的需求,从而验证了本文标定方法的可行性。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









