





码垛机器人目标的识别与定位
时间:2017-12-15
阅读:11790

码垛机器人目标的识别与定位
码垛机器人图像目标的识别方法主要有模板匹配法和特征匹配法。
模板匹配法又称相关匹配法,在匹配时会将本次采集到的图像与之前采集到作为模板的图像进行比对,并计算二者间的相关性,相关值越大,越容易完成匹配。匹配的主要工作是将模板在图上平移并计算其相关值,相关值最大处即为匹配最好处
模板匹配法在噪声干扰较大的场合拥有很强的优势,然而由于模板匹配的过程是要在给定区域内逐次进行比对,计算量也十分大,因此匹配效率有限。如果目标物体具有明显的几何特性,那么就并不适用于模板匹配法。模板匹配法适合在一些环境变化小、目标尺寸变化小等场景下工作。同时,为了减少模板的计算量,一方面可利用一些先验知识减少需匹配的位置;另一方面可利用在相邻匹配位置上,模板覆盖范围有相当大重合的特点来减少重新计算相关值的数量
特征匹配法是通过研究匹配目标的特征进行识别处理操作,人们对它的研究很多,应用也十分广泛。物体的特征有很多,包括面积、周长、角点等几何信息,也包括物体的纹理、颜色、形状的物理信息。特征匹配法实际上是依照某种特征,通过特征抽取的方法把图像上的像素点归类为不同的集合,然后再进行比对。特征匹配法对图像的几何特征等感兴趣,可以充分发挥图像的几何特性来进行匹配。同时它把图像抽象一组数据,简化了计算量和存储空间。一般来讲,由于它对噪声敏感,需要做好图像预处理等前置环节的工作,以减少噪声对图像特征的干扰。
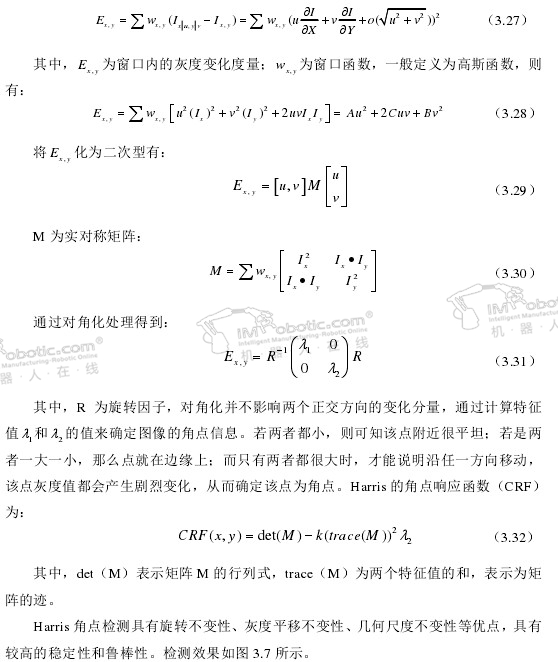
本文实验中所用到的码垛物体为标准的几何工件,角点、轮廓等几何特征十分明显,因此本文采取角点匹配法来检测工件。角点是图像中最基本的一种关键点,它是由图像中一些几何结构的关节点构成,很多都是线条之间产生的交点。Harris角点是一类比较经典的角点类型,它的基本原理是计算图像中每点与周围点变化率的平均值。Harris角点从图像局部设定的小窗口来观察图像特征,而如果窗口向任意方向移动,都会导致图像灰度变化,那么该点就为角点。式(3.27)为Harris角点灰度变化量的表达式:
本章对码垛机器人视觉系统中图像处理算法进行了分析、研究和仿真,其中包括图像预处理、图像分割、目标识别以及目标定位等。介绍了利用中心矩和二阶矩求取工件中心和位姿,并对所有方法进行了仿真实现,为后续的实验提供工件的形状、位置信息。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









