





码垛机器人基于R支配的轨迹改进规划算法
时间:2017-12-24
阅读:9027

码垛机器人基于R支配的轨迹改进规划算法
算法问题描述和总体设计
传统的轨迹规划算法中,对于码垛机器人的轨迹规划主要存在着以下的不足:根据码垛机器人作业轨迹的特点,其同一层前后步之间的轨迹呈现着一定的相关性。因此前一步的轨迹规划结果,可以被下一步的轨迹规划所采用。而传统的轨迹规划算法中,并没有对此进行考虑。因此本文在传统的轨迹规划算法基础上进行了一定的改进:针对传统算法中,对于码垛机器人无法利用前后步轨迹信息的问题,引入了R支配理论,采用R支配的方法求解码垛机器人最优轨迹。
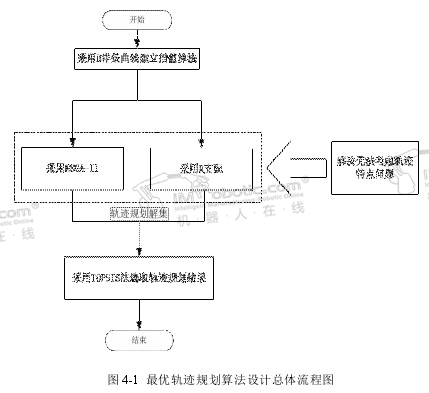
对于本文中对于改进算法的设计,大体可以分为以下的几个步骤进行,算法设计流程如图4-1所示:
(1)建立轨迹插值算法:不同的轨迹插值算法,对于机器人最终的运动轨迹有着不同的影响,因此轨迹插值算法需要满足机器人在运动学上的约束。
(2) NSGA-II多目标轨迹规划:在轨迹规划中有着多个不同的目标,同时对于同一层第一步的轨迹需要采用NSGA-II多目标轨迹规划进行求解。
(3)基于R支配的多目标轨迹规划:如上所述,在获得了前一步的轨迹规划结果之后,根据此结果规划当前步的轨迹。
最优目标的建立和轨迹插值算法选择
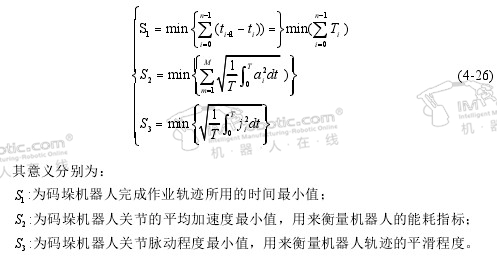
一般而言,机器人在执行规划的轨迹的过程中,都期望机器人执行轨迹的时间最短,轨迹最为平滑,执行轨迹的过程中能耗最小和关机驱动的力矩变换最小等。本文根据项目背景和文献中常用的用于求解机器人最优轨迹的目标函数的定义,选择本文中机器人的轨迹规划的最优化目标如式(4-26)所示:
为了能够保证轨迹规划曲线的光滑和连续性,本文选择采用7次B样条曲线插值方法作为文本中轨迹插值的基本策略。
4.2.3基于R支配的轨迹规划算法设计
在传统的机器人轨迹规划中,对于码垛机器人的轨迹规划,仅仅局限于单条轨迹的规划,而对于各个工作轨迹之间的关系并没有考虑在内。例如对于一个垛有五个包的作业环境下,第i层第k包的作业轨迹和第k+1包的轨迹,在关节角空间上其轨迹差别不大。在传统的码垛机器人轨迹规划中,往往将第k包的作业轨迹和第k+1包的轨迹独立开来进行轨迹规划,造成轨迹规划时的重复计算。因此,倘若将第k包的轨迹规划结果作为输入,设置成为参考方向,令轨迹规划中种群的进化向着参考方向进化,则可以减少无谓的计算,提高轨迹规划的效率。因此本文在此,对于第k+1包的轨迹规划采用基于R支配的非支配排序算法进行求解,将第k包的结果作为参考点输入算法。
如图4-2所示,对于R支配在本文中的运用,主要体现在以下几个方面:
(1)根据之前NSGA-II得到的结果,将其作为参考点输入到R支配的算法中,使得种群在进化的过程中,沿着一个方向进化。
(2)在进化了M CM小于NSGA-II中总体进化代数)代之后,查看当前的种群,如果种群有超过n%的个数数量在参考点附近,则停止进化。
(3)在当前的种群中如果有个体能够支配参考点,则将当前个体设置为下一步轨迹规划的参考点。
(4)如果没有个体可以支配参考点,则在种群中选择离参考点最近的个体并将个体中优于参考点的分量替换到参考点,获得新的参考点。

基于R支配的轨迹规划仿真验证
如前一小节所述,本文建立了基于R支配的轨迹规划算法。为了能够验证基于R支配的轨迹规划算法能够节约轨迹规划的时间,本小节采用Python对算法进行实现并对其进行仿真验证。
4.2.4.1仿真实验数据和参数说明
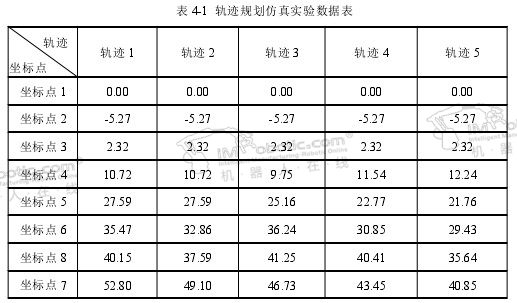
为了能够对于论文算法中,考虑到前后轨迹相关性的改进,本小节采用工业现场中采集到的多段大臂电机运行的轨迹,对其进行仿真实验以期验证程序的有效性。仿真实验数据如表4-1所示:
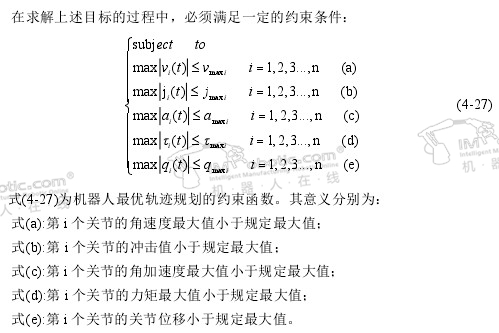
实验中进化参数如下:
(1)最大关节速度上限:110度/秒
(2)最大关节加速度上限:250度/秒
(3)初始种群规模:200
(4)交叉率:0.6
(5)变异率:0.05
(6)进化代数:100
(7) R支配进化代数M: 10
(8)种群在参考点范围内百分比n%: 50%
(9)最小化时间权重值:0.65
(10)最优能量权重值:0.165
(11)最平滑轨迹权重值:0.185
仿真实验结果及其分析
根据上述的实验数据,采用本文中设计的算法,可以得到如表4-2所示:
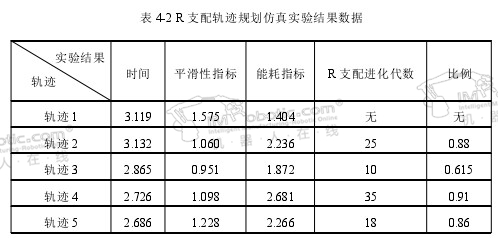
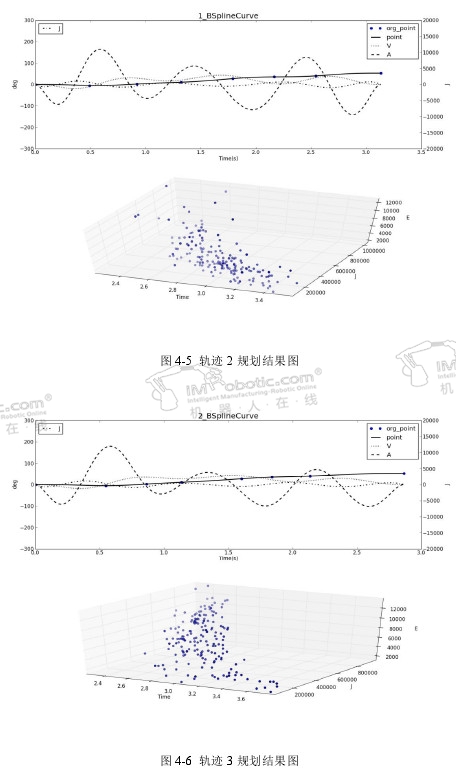
由上述的实验结果可以见得,轨迹规划的第一条轨迹的结果为(3.119, 1.575,1.404),如图4-4所示。根据算法的设计,从第二条实验轨迹开始,便采用R支配进化算法,将轨迹1的结果作为参考信息输入,加速轨迹规划的结果。从图4-5中也可看出,个体种群的进化方向都朝着点(3.119, 1.575, 1.404)方向进行了聚集。根据表4-2中的数据可知,在R支配进化25代之后,聚集在点(3.119, 1.575, 1.404)周围的个体数超过了88%,己经超越了50%的阂值,因此停止进化,从中选择了解(3.132, 1.060, 2.236),而不必如轨迹1一样迭代进化100代,可以极大的缩短轨迹规划的时间。
在轨迹3的规划中,因为轨迹2的结果并不能支配上一个参考点(3.119, 1.575,1.404),所以需要替换当前结果中优于参考点的分量到参考点中获得新的参考点。因此可以得到新的参考点为(3.119, 1.060, 1.404)。如图4-6所示,在进化10代之后聚集在参考点周围的解的比例个数为61.5%,己经超越了50%的阂值,因此停止进化,选择了解(2.865, 0.951, 1.872)。
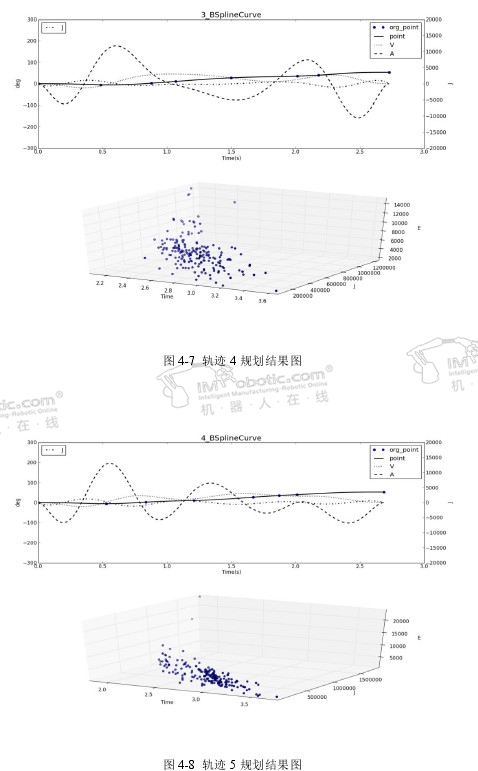
在轨迹4的规划中,因为规划结果(2.865, 0.951, 1.872)可支配参考点,因此当前的参考点为(2.865, 0.951, 1.872)。如图4-7所示,在进化了35代之后,聚集在参考点周围的解的比例个数为91%,己经超越了50%的阈值,因此停止进化,选择了解(2.726, 1.098, 2.681)。
在轨迹5的规划中,因为轨迹4的结果并不能支配上一个参考点(2.865, 0.951,1.872),所以需要替换当前结果中优于参考点的分量到参考点中获得新的参考点。因此可以得到新的参考点为(2.726, 0.951, 1.872)。如图4-8所示,在进化了18代之后,聚集在参考点周围的解的比例个数为86%,己经超越了50%的阈值,因此停止进化,选择了解(2.686, 1.228, 2.266) 。
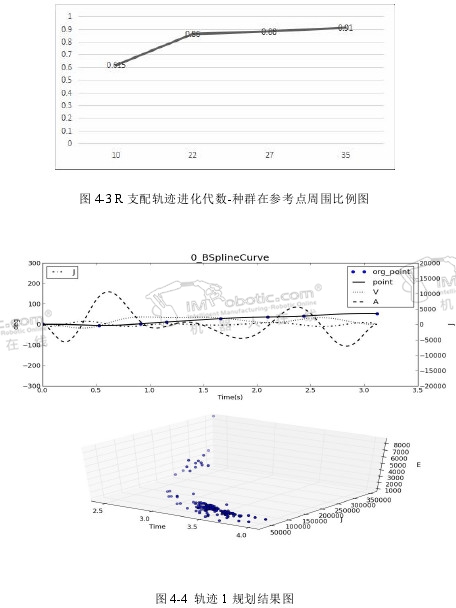
图4-3给出了采用R支配轨迹规划算法,在进化代数和种群在参考点周围比例的对应关系图。其中横坐标为进化代数,纵坐标为种群在参考点周围比例。从图中可以看出随着R支配的进化代数的增加,聚集在参考点附近的种群个体数也随之递增。
因此根据本实验的数据,可以验证得到采用本文中改进的R支配轨迹规划算法,可以在获得了第一段轨迹的规划结果之后,根据此信息加速后续的轨迹规划进度,极大的节约轨迹规划的时间。
本章主要研究了码垛机器人的最优轨迹规划问题。首先介绍了基于7次B样条的关节角空间轨迹规划方法,并对其约束进行了转换。之后针对传统轨迹规划中,无法有效利用上次轨迹的规划结果的问题,引入了基于R支配的非支配排序方法,做出了改进。最后对算法进行了仿真和测试,结果表明此算法的效果良好。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









