





码垛机器人软件系统结构设计
时间:2017-12-24
阅读:8635

码垛机器人软件系统结构设计
本文中对于整体系统进行了层次划分如图5-1所示:
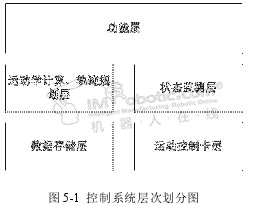
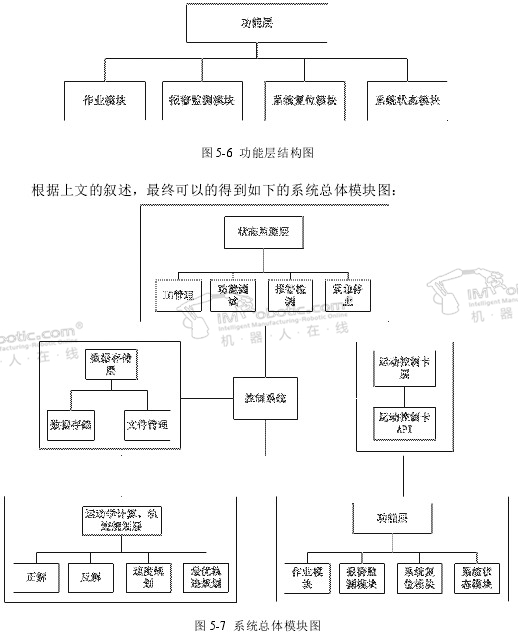
根据上图可知,系统一共分为以下的几层:
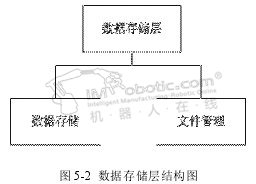
(1)数据存储层
数据存储层,主要负责对于系统的数据文件提供操作接口,例如添加数据、删除数据、修改数据和查询数据等。同时还需要提供数据文件的管理功能,对系统己有的系统文件进行管理,保证系统文件的安全性。
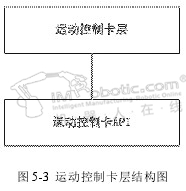
(2)运动控制卡层
文采用的运动控制卡,其提供了一套基于C++编写运动控制API。为了能够保证在系统后期如因设计变更或其他原因,导致运动控制卡选择其他的类型不会影响整个软件系统其他部分实现和功能,需要对原生的运动控制卡API进行抽象和包装,屏蔽其实现,仅对调用者提供包装过后的接口。
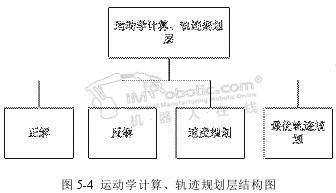
(4)运动学计算、轨迹规划层
对于控制系统而言,需要根据指令驱动码垛机器人进行运动。用户使用机器人时,使用的是笛卡尔坐标系,而对机器人的运动控制需要的是关节角空间坐标系,所以需要有专门的程序模块提供运动学数学计算功能。同时为了提高机器人的性能,需要对机器人的作业轨迹进行规划,根据本文第四章的工作,需要实现最优轨迹规划功能。
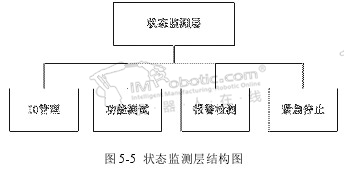
(5)状态监测层
整个运动控制系统中有诸多不同的外设和传感器,其在机器人运动的过程中监测整个机器人的状态,对其进行状态采集,可以知道当前机器人运行是否出现异常。因而需要有单独的功能层次,对整个系统提供接口。状态监测层主要包括了以下的几个功能:1) IO管理,主要提供对于系统IO的查看、配置功能;2)功能测试,主要提供对于一些外设,例如流水线,抓手气缸等的维修功能测试;3)报警检测,当系统发生限位、过载或者其他异常情况时,需要能够及时检测到异常状态;4)紧急停止,对于发现的异常情况,需要立即对系统采取停止操作。
(6)功能层
功能层是整体控制系统最外层的模块,其对上述几个层次的模块进行了整合,同时对外提供了操作整个机器人的功能接口,主要包括:1)作业模块,主要提供作业功能支持,例如码垛、示教等;2)报警检测模块,对外提供当前系统报警的状态信息;3)系统复位模块,当机器人发生异常或者开机上电,需要提供系统复位功能,使得机器人处于归零位置;4)系统状态,对外界提供码垛机器人当前所处于的状态信息。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









