





码垛机器人控制系统运行测试
时间:2017-12-24
阅读:8576

码垛机器人控制系统运行测试
根据之前的所有工作,本文实现了码垛机器人控制系统,并在生产环境下进行了系统运行测试。系统测试工作主要分为系统码垛功能测试和系统精度测试。
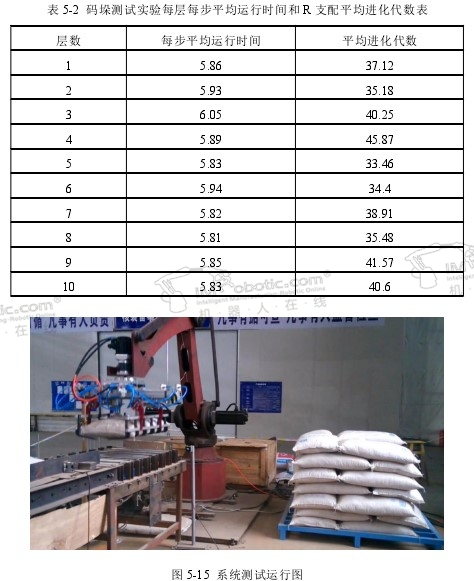
首先对机器人控制系统进行了码垛测试实验,其参数如表5-1所示:

当前各个最优目标之间的权重比例如下:
(1)时间:0.65
(2)平滑性指标:0.165
(3)能耗指标:0.185
根据表5-1中的实验参数和权重比例,对系统进行测试可以得到如表5-2的数据。根据之前的设计指标单步码包时间为6S。根据表5-2的数据可以看出,系统单步码包时间基本稳定与6S左右。同时,因为采用本文的改进轨迹规划算法可以得出平均每层的进化代数在33.46至45.87之间,可以节约轨迹规划的时间。因此根据测试结果,可以表明当前控制系统己经完全达到了工业化自动码垛的功能和要求。
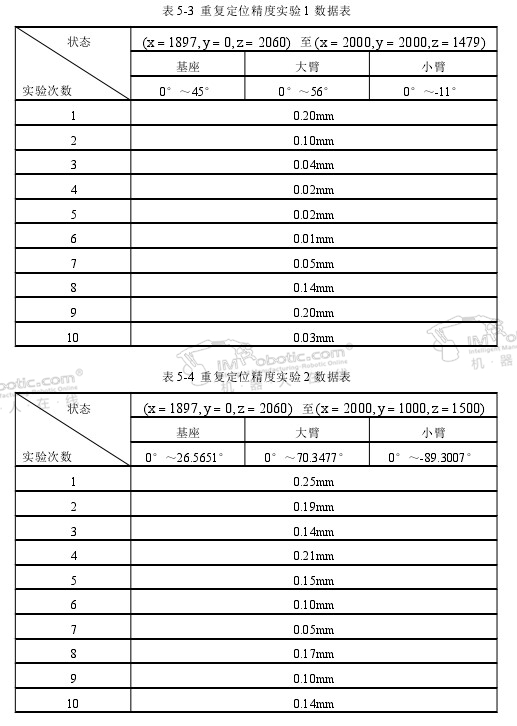
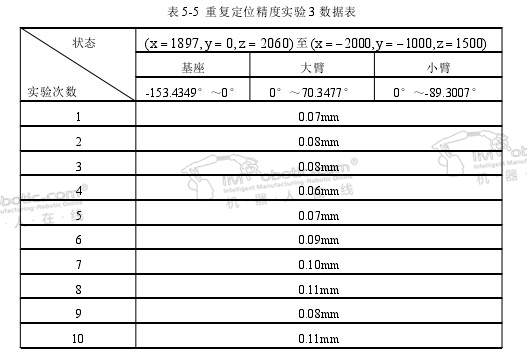
其次,对本文中码垛机器人系统进行了重复定位精度的测试。重复定位精度指的是系统采用同样的运动方法,从同一个起点到达同一个位置的一致性。本文对于机器人从三个不同的定点出发进行了重复定位精度实验。
根据测试的实验结果,给出了如下表5-3至5-5的数据。由实验数据可以表明,当前机器人重复定位精度误差都在10-1 mm级别,其主要有摩擦,机械加工工艺等导致,因此系统精度可以满足作业要求。
本章在之前的所有章节的分析和设计的基础上,对系统的软件架构进行了分析,采用了现今成熟的软件设计原则设计了整体的软件架构。之后选择了最合适于本系统开发的编程工具,根据之前的算法和需求设计,实现了本文中的码垛机器人控制系统。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









