





码垛机器人回转关节T轴电机和减速机选型
时间:2018-01-04
阅读:13906

码垛机器人回转关节T轴电机和减速机选型
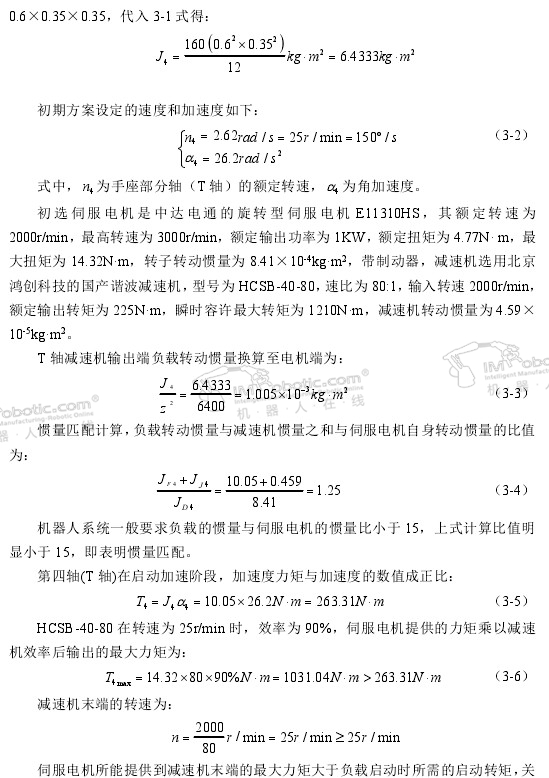
手座部分的电机和减速机是用来驱动末端执行器旋转的,末端包括纸箱和末端抓手,总负载可以看成一个长方体,其长宽高分别为a, b, c,计算公式:

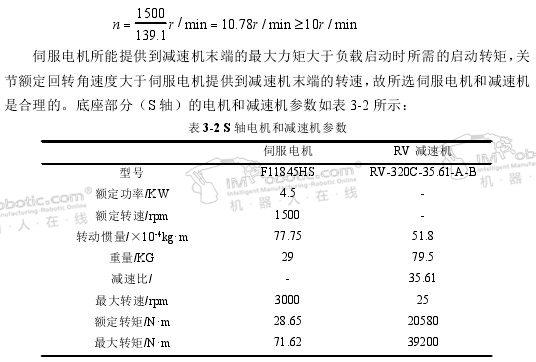
码垛机器人底座部分的减速机,本课题选择了RV-C型减速机系列,C型相对与E系列有一下特点:
(1) C系列减速机结构为中通型,电缆、气管和其它信号线等均可通过该中间孔穿过,使得机器人结构紧凑,走线安全;
(2) C系列内部有压力角接触球轴承:相对于E系列减速机,其球角接触球轴承更大,可靠性更强,刚性更高,因此能够支持更高的外部载荷。
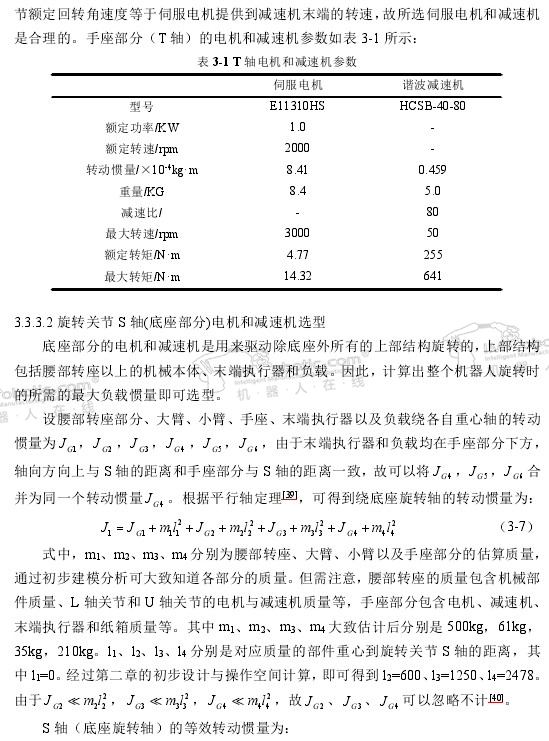
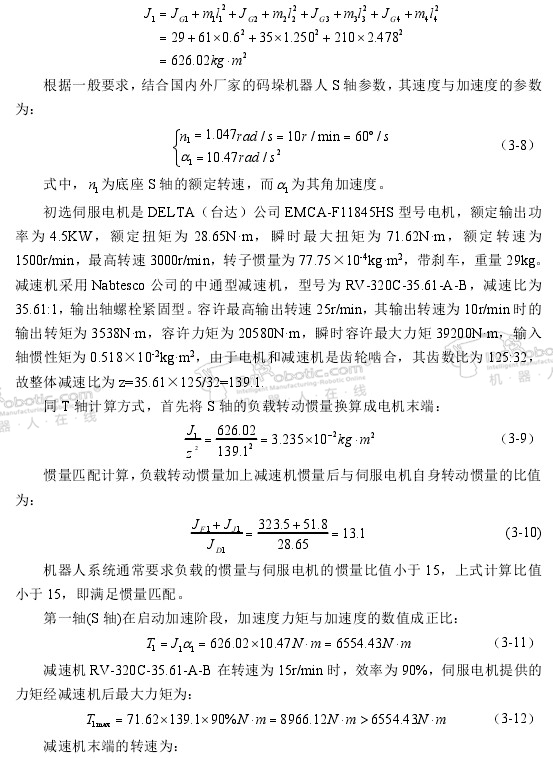
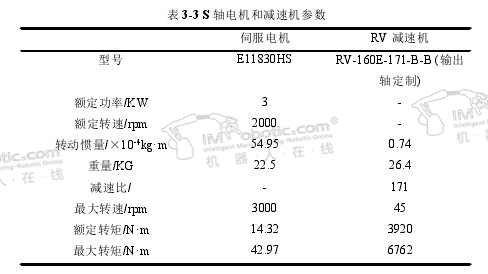
S轴和T轴的电机与减速机选型之后,需为腰部转座上控制大臂(L轴)和小臂(U轴)的两个电机和减速机选型,两者对称安装。基于经验,一般码垛型机器人腰部转座上的两个电机和减速机型号相同。因为L轴与和U轴的计算方法较S轴和T轴不同,且更为繁琐,其中驱动力矩是以关节转动角度为自变量的函数,如果仅根据转动惯量计算驱动力矩,则方法较为欠妥。具体计算方法应采用牛顿一欧拉公式递推和动力学仿真方法来选择大臂和小臂驱动电机与减速机。刘凤臣在文章《基于目标轨迹的高速重载搬运机器人电机参数预估》中有介绍。具体选型参数如表3-3所示:

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19 -
自主装卸机器人原理与应用
关键字: 赛那德 自主装卸机器人 2024-06-17 -
工业用急停开关什么牌子好,优势有哪些?
关键字: 急停开关 品牌 优势 2024-06-13
-
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03 -
安川机器人驱动器如何设置参数?
标签: 安川机器人,驱动器,设置参数 提问:先知 2024-06-13 10:15:03

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04
- 2024-05-31
- 2024-05-29









