





焊接机器人工作站的工作原理
时间:2018-05-08
阅读:13687

焊接机器人是当今社会工业生产中先进的焊接设备,其应用得到了广泛的推广,是我国焊接行业进入自动化时代的重要标志。不过机器人应用需要大家有足够的知识基础,下面就来介绍焊接机器人工作站的的工作原理,希望能够有所帮助。
焊接机器人工作站的系统构成是由各单元构成,在焊接动态过程自动检测功能焊接机器人在焊接过程中对熔池尺寸、熔透、成型及电弧行为等参数实行在线检测,以实现焊接质量的实时控制。
焊接机器人工作站正常运行的中枢是其控制柜中的计算机系统。焊接机器人工作站通过计算机系统对焊接环境、焊缝跟踪及焊接动态过程进行智能传感,根据传感信息对各种复杂的空间曲线焊缝进行实时跟踪控制,从而控制焊枪能够实现规划轨迹运行,并对焊接动态过程进行实时智能控制。由于焊接工艺、焊接环境的复杂性和多样性,焊接机器人工作站在实施焊接前,应配备其焊接路径和焊接参数的计算机软件系统。该软件要对焊缝空间的连续轨迹、焊接运动的无碰路径及焊枪姿态进行规划设计,并根据焊接工艺来优化焊接参数。
以上就是关于焊接机器人工作站工作原理的介绍,工业机器人大量投入到企业生产中,标志着我国的企业成功向生产自动化迈进,并取得傲人的成绩,这在整个世界发展中也是不多的,衷心希望未来会有更多的机器人与大家见面。
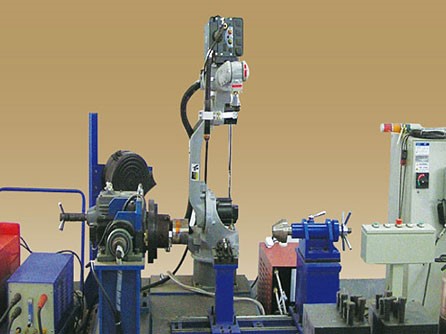
焊接机器人工作站
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-11-22 15:31:53
- 2023-01-25 10:54:43
- 2018-08-28 10:05:41
- 2022-11-16 14:28:54
- 2018-08-29 12:20:41
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









