





欧洲顶尖实验室研发的这个双足平衡机器人,与波士顿动力相差几何?

DLR是欧洲最优秀的机器人实验室之一,90年代初期其因为希望将机械手臂送上太空代替人类,开始开发轻量化机械臂,拥有LWR,Hasy,人形机器人Justin和TORO等多个知名机器人。最近,YouTube上一段TORO机器人控制平衡的视频引来不少点击,其实TORO机器人已经经历了几个版本的“升级”,今天我们就来介绍一下德国宇航局的人形机器人TORO以及它的伙伴们。
大家看TORO的样子,有没有觉得它和我们之前介绍过的一款名为Rollin'Justin的人形机器人有些像,Rollin'Justin也出自DLR实验室,曾向我们展现过优秀的家务能力,还能协助太空宇航员。

(机器人Rollin'Justin)
有腿的仿人机器人要能执行多种任务。它们要能与环境互动,遇到外部障碍时能扭转身体,同时还要保持稳定协调的平衡。
为此,研究人员提出一种新的控制方法,把多级别控制和平衡结合。他们在仿人机器人TORO身上模拟了这种方法。为了达到恰当平衡,他们先把所有的任务力/力矩分配到终端受动器,然后按照任务级别映射到连接空间。

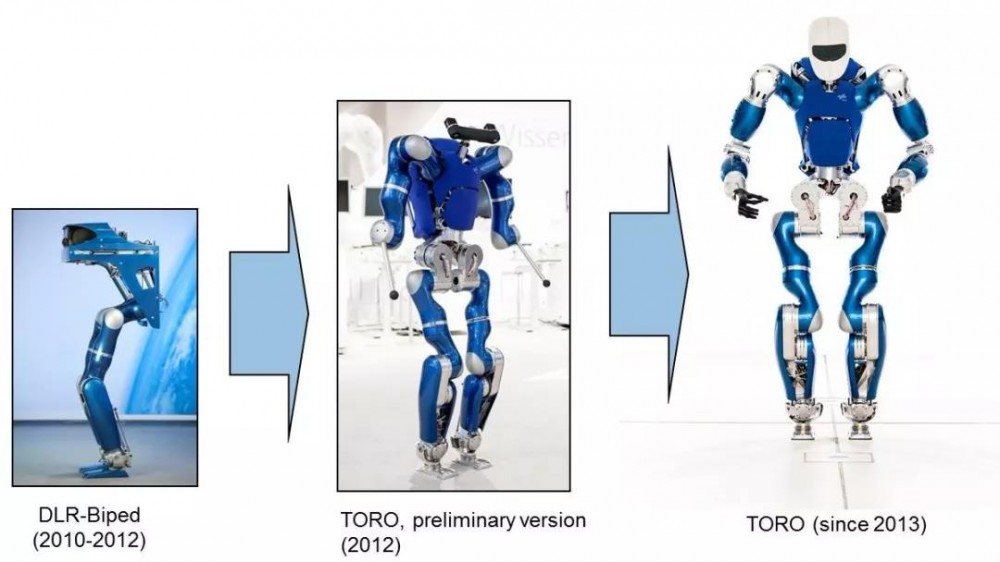
TORO的总重量约为75千克,高度约为160厘米。是基于前DLR-Biped双足类人机器人设计而来。为了适应腿部基础并减少行走时的负荷,研究人员重新设计了髋部结构。前两个肩关节由DLR轻型机器人手臂的一部分组装,而其余部分则是定制的。
为了与环境相互作用,TORO的手臂配备了铰接式指针。由于TORO将主要用于研究与全身动力学相关的控制导向问题,因此研究人员决定使用相当简单但坚固的假手。
这些手能够与环境进行多种交互,但在灵巧操作方面则受到一些限制。对于环境感知和运动估计,该系统配备有立体摄像头,IMU和Kinect传感器的致动头。
下面这个机器人是DLR研发的拟人机器人David。以前David是被称为DLR手臂系统,具有可变刚度执行器(VSA)的关节,其在传动系中具有机械可调节的灵活性。其发展的一个目标是接近人的能力,特别是在动力学,灵活性和稳健性方面。该机器人于2010年首次公开展出。
别看David是一个成年人的样子,重量只有26公斤,具有41个自由度,165个位置传感器,据说在与人类相近的工作空间内,其工作速度可以与人类相媲美。David对机械弹簧产生的冲击具有很强的抵抗力,所有关节都具有可变刚度,能实现通过弹簧储能的动态运动。

和Rollin'Justin长得比较像的另一个机器人叫SpaceJustin,是一个人形上身,由两个轻型机器人手臂,两个DLR-HIT手,一个躯干和一个头部组成。

DLR还研发过一个蜘蛛外型的Crawler机器人,足迹5厘米x 38厘米,离地间隙最大12厘米。质量3.66千克,具有18个活动腿关节。有效载荷为3公斤,速度高达20厘米/秒,该机器人于2008年首次向公众展示。

针对地面和地外探测,研究人员为DLR Crawler开发的所有运动和导航相关算法都集中在先验未知的GPS拒绝环境。DLR爬行器的步态算法采用高度灵活,分散的方法,其中相邻的腿通过抑制或激发步伐运动而相互影响。
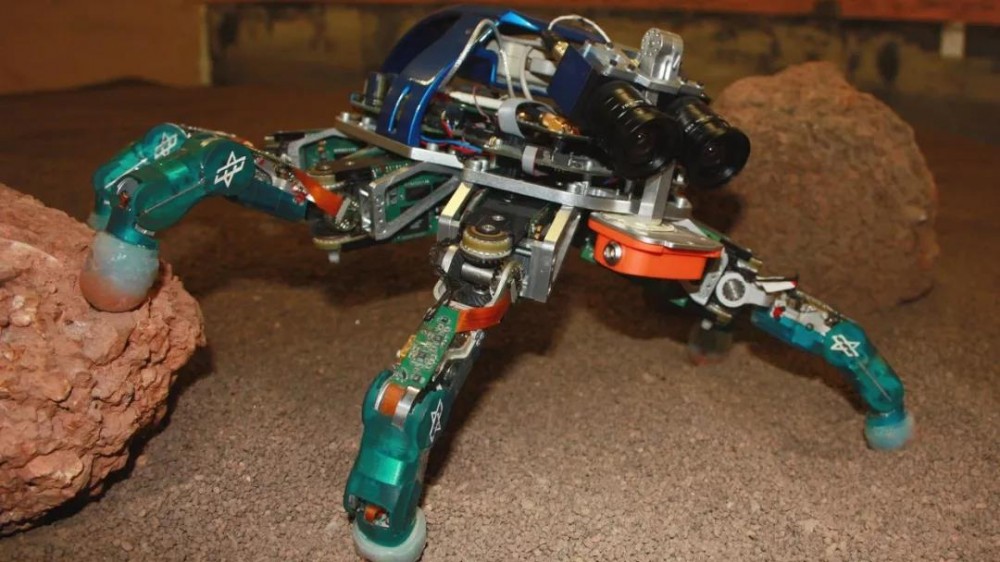
因此,DLR爬行者的步态不显示固定模式,而是根据命令速度和腿与当地环境的相互作用而出现。为了在未知地形中导航,DLR Crawler还装有立体摄像头,基于半全局匹配的立体视觉算法,机器人可评估地形的可穿越性,并仅根据其车载传感器获取的信息计划到达目标。
最后来看看TORO机器人是如何保持平衡的吧~

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2015-08-07 08:00:00
- 2016-07-13 00:00:00
- 2018-12-06 11:47:31
- 2016-07-15 00:00:00
- 2016-07-25 00:00:00
- 2015-08-07 08:00:00
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2018-09-11 10:05:45
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









