





【干货】ABB机器人零位校准的那些秘密

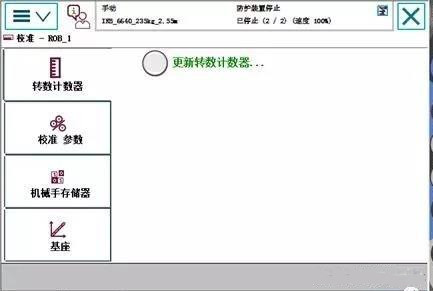
1. ABB机器人校准界面有如下功能,分别代表什么含义?

2. ABB机器人电机采用单圈绝对值编码器,即电机转一圈,编码器能输出绝对位置。但是由于减速比的缘故,实际机器人转180°,电机要转几十圈到几百圈不等(取决于减速比)(ABB机器人本体减速比查看方法:减速比、电机角度、电机偏差之间的关系)
3. 当电机旋转超过一圈,旋转的圈数就通过机器人来计数(SMB板)。
4. 机器人实际显示的位置就是由圈数+单圈偏移再乘以减速比得到。
5. 机器人在出厂时,会通过仪器来测试,获取机器人的标准零位。
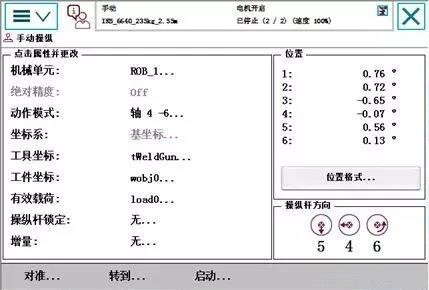
6. 机器人在零位时,机器人各轴会在刻度线附近

7.此时的零位位置是通过仪器测定的,此时,会把电机转数清零,机器人本体上的银色标签数值就是此时机器人各轴单圈编码器的反馈值(下图用弧度表示角度)
上述值也可以在示教器的校准-校准参数-编辑电机校准偏移里查看,示教器显示的值和标签值一致
8.只要编码器和电机没有脱开,电机和机械本体没有脱开(机械相对关系没有发生变化),零位的编码器反馈值都是不会变化的,即上图银标签的值。如果有人误修改,可以人工把银标签的值输入机器人并重启来保证机器人绝对零位(只要电机没有拆装过)
9. 在机器人不通电的情况下,电机转数是需要通过SMB上的电池来存储,如果机器人不通电时电池没电等,机器人开机后就会报错“转数计数器没有更新”。此时,只是电机的旋转圈数丢失,零位的参考编码器值没有丢失。
10. 发生9的错误时,把相关轴移动到刻度线附近(肉眼允许有偏差),点击“更新转数计数器”即可,此时更新完后,各轴显示数据非零,而是此时机器人的位置(比如零点几度,由于肉眼对刻度造成的误差所致)

11. 以上操作,并没有改变机器人原有“真正”零位位置,也就是肉眼的误差不会影响机器人零位准确性。
12. 在机器人电机拆装过后等(电机与本体装配关系发生变化),此时原有绝对零位位置信息已经不准确(也就是本体银标签某个轴的数值已经不能代表真正零位信息)。
13. 此时要保证零位绝对正确,可以联系ABB售后使用仪器来重新标定。
14. 如果现场要求不高,也可在机器人拆电机前移动到绝对零位(示教器显示0),在对应轴画细线做标志,更换电机后,把该位置作为绝对零位。
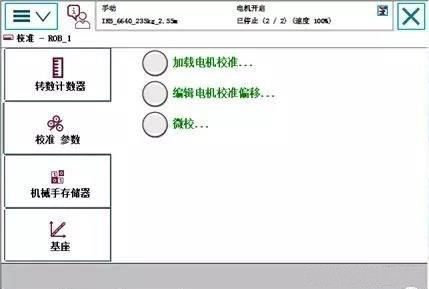
15. 如果做了14的操作,可以点击下述页面的微校,此时校准后,该轴数据即显示为0.0
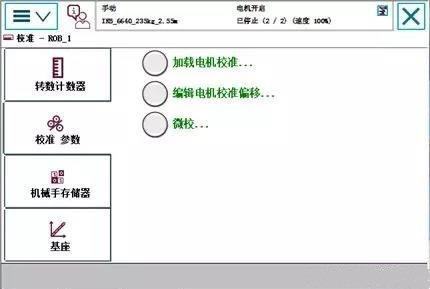
此时即把对应轴的电机偏移值也修改了,可以到校准参数-编辑电机校准偏移查看


好的文章,需要您的鼓励
30

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2022-08-03 10:20:40
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









