





【优傲机器人】改善优傲机器人抗噪声能力

本文主要介绍如何改善优傲机器人抗噪声能力(适用机器人型号:UR5、UR10、UR3)
当优傲机器人暴露在有电磁干扰(EMI)的安装环境中,有时会出现通讯问题或丢失数据包,导致机器人发生报警或错误。下面将介绍 7 点建议如何克服电磁干扰环境,但是在介绍之前我们先描述一下 3 种情况可能产生电磁干扰。
A. 比较典型的是一些有电磁干扰的设备产生的辐射,比如电机的启动与停止,以及一些焊接设备。
B. 当有电磁干扰的设备与其他设备共用同一个电源,那么其他设备可能受到电磁干扰。
C. 当机器人抓起的工件来自于传送带,或者工件是塑料制品,有时会在机器人夹爪或者法兰盘上发生静电放电。
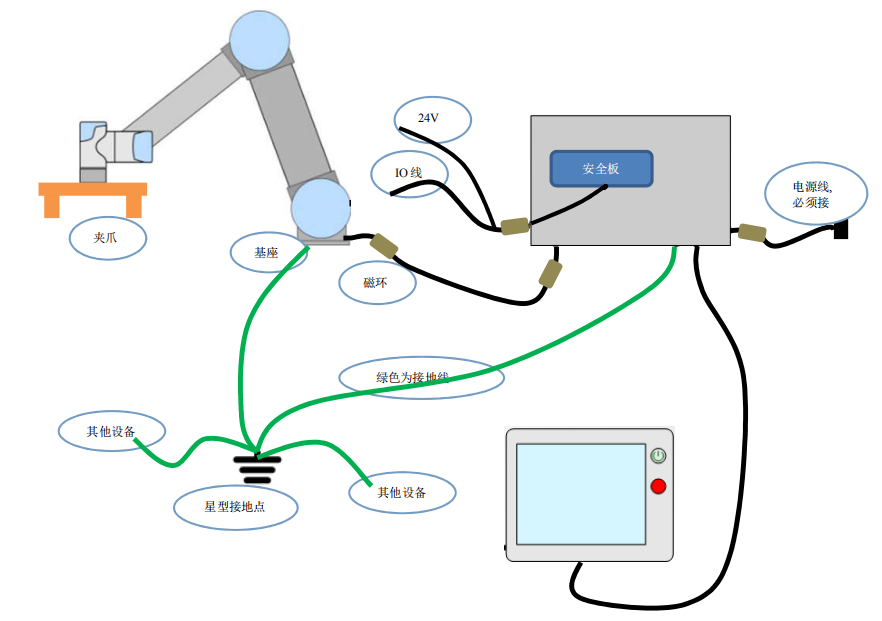
一、星型接地
机器人工作站中的所有设备,接地必须要接到同一个点上,在这里我们称为星型接地。
A. 机器人控制柜中有接地导柱,连接接地导柱到星型接地点。
B. 所有工作站中的其他设备以及金属框架,需要接到星型接地点。
C. 在必要情况下,机器人的基座上需要引一根接地线到星型接地点上,注意基座法兰盘有一层氧化层包裹,需要在连接点上刮去氧化层,确保良导体。
二、分开电缆
一般有电磁干扰的设备会产生电场和磁场,越远离该设备,受影响的概率会呈指数下降趋势。所以我们让机器人电缆,以及控制柜电源线远离线圈,电机,以及一些经常开关机,启动停止,改变状态的设备。电缆与电缆之间建议至少相距 100mm。
三、IO 使用
一些 IO 信号连接到控制柜中,且机器人和其他的外部设备一起使用的,比如说 PLC,建议所有的 IO 供电使用外部设备供电。如果 IO 信号由机器人控制柜供电,外部设备也没有供电能力,那么建议购买额外的开关电源,由它来供电。
四、不间断电源(UPS)
在一些地区电源本身可能会有噪声,并且电压也不稳定,这个时候就需要用 UPS。注意 UPS 需要满足下面 2 个条件。
A. 抑制噪声,稳压功能。
B. 满足机器人的供电功率。
五、夹爪隔离
在一些应用中,机器人从传送带上抓工件,或者工件是塑料制品,机器人的夹爪暴露在 ESD工件中,在这种情况下夹爪必须要与机器人工具端隔离,或者夹爪需要与工件隔离。
六、软件版本
确保 Polyscope 软件版本是 3.1.18024 或者更新,但是注意当机器人需要升级 Polyscope 软件时,需要仔细阅读 release note(release note 说明了新软件相对于旧软件更新了哪些地方)。另外,当升级了 Polyscope 软件,安全板、工具端、示教器中的软件不能自动更新,所以如果升级了 Polyscope 后还有关于安全板、工具端、示教器的通讯问题,建议联系优傲机器人升级安全板、工具端、示教器的软件。以下机器人序列号之前的机器人 Polyscope 软件版本低于 3.1.18024。
UR3 2015330114
UR5 2015351075
UR10 2015300919
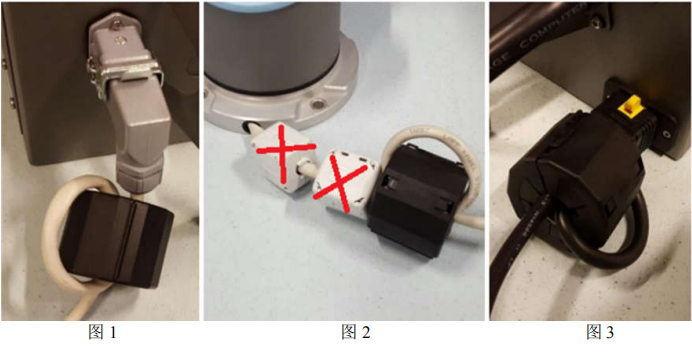
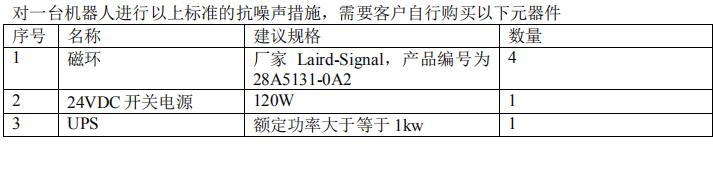
七、磁环
磁环有助于电磁干扰进入系统的分险。
A. 在机器人到控制柜的电缆上,将磁环安装在靠近控制柜的一端,可以防止电磁干扰进入控制柜,如图 1 所示。
B. 在机器人到控制柜的电缆上,将磁环安装在靠近机器人手臂一端,可以防止电磁干扰进入机器人手臂,如图 2 所示。
C. 在控制柜的电源电缆上,安装磁环,可以防止电气噪声进入机器人系统,如图 3 所示。
D. 在控制柜中,将磁环包裹住所有 IO 线,可以防止电磁干扰进入控制柜。

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2022-08-03 10:20:40
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









