





【焊接】机器人焊接应用——车身焊接(上)

本文结合实例介绍了点焊机器人、螺柱焊机器人和弧焊机器人系统在车身焊接中的应用。
轿车车身的结构和工艺在很大程度上决定了乘车的安全系数。车身本体是由十几个大总成和数百个薄板冲压件,经点焊、弧焊、激光焊、钎焊、铆接、机械连接以及胶接等工艺连接成的复杂薄板结构件。由于白车身所涉及的零件多、工艺复杂且设备类型繁多,因此车身规划对焊接工艺、装焊夹具、质量控制以及维护保养等都有较高的要求。
点焊机器人系统
车身点焊的质量直接影响着汽车车身强度和使用安全性。点焊设备因易于机械化、成本较低廉、技术成熟且配套设施完善,在汽车车身的生产中应用得最为广泛。现在,点焊焊接过程完全自动化已成为趋势,机器人点焊系统已得到广泛应用,正逐步取代手工点焊。
一、点焊机器人

1、气动点焊机器人系统
气动点焊机器人系统包括机器人本体、机器人控制器、点焊控制器、自动电极修磨机、气动点焊钳和水气供应的水气控制单元等,如下图所示。

气动焊钳作为点焊机器人的执行机构,目前普遍采用了一体化焊钳,就是焊接变压器装在焊钳后面,减少了二次电缆的损失,提高焊接质量。由于采用一体化焊钳,变压器必须尽量小型化,提高机器人有效负载。对于容量较大的变压器,已开始采用中频逆变技术:把50Hz工频交流变为600~1000Hz交流再整流,使变压器体积减少、减轻。
气动焊钳电极组件形式上与手工焊接焊钳基本相似,完成与工件接触及通电焊接作用,为降低维护改造成本,焊钳组件有模块化的趋势。点焊机器人动作稳定可靠,重复精度高,可代替人的繁重体力劳动,并且提高了焊接质量,提高了生产线柔性。
2009年,上汽乘用车公司南京基地新建10万辆荣威350系列轿车AP11焊接生产线。该线从日本FANUC公司引进49台六轴气动点焊机器人,应用在工艺要求较高的车身下车体总成焊接工位、侧围总成及车身本体的装配焊接上。
在成功新建AP11主线后,上汽乘用车公司南京基地于2011年在AP11基础上建设MG5车型生产线时,再次引进引进日本FANUC公司的10台点焊机器人,用于6万辆生产能力的AP12主线上,应用在工艺质量要求较高的车身下车体总成焊接工位、侧围部件、侧围总成及车身本体的装配焊接上。
与原AP11主线不同的是,建设投产的AP12主焊线与AP11线实现设备全部共用,充分满足了柔性混线生产的需求,实现了短时切换或无需切换的全柔性生产模式。为节省建设成本及场地,我们将生产线多数工位上的一台机器人改造为可带两把以上焊钳或抓手工具,通过采用自动工具交换装置可快速进行焊钳间的切换。
2、伺服点焊机器人系统
伺服点焊机器人系统包括机器人本体、机器人控制器、中频点焊控制器、自动电极修磨机和伺服点焊钳等。伺服焊枪的优点是传统气动焊机无法比拟的,其最大的特点是以伺服装置代替气动装置,按照预先编制的程序,由伺服控制器发出指令,控制伺服电动机按照既定速度、位移进给,形成对电极位移与速度的精确控制,脉冲数目与频率决定电极位移与速度,电动机转矩决定电极压力。
伺服焊枪具有增强诊断及监控、简化焊钳设计、提高柔性、降低维修率、提高运行时间及减少生产成本(耗气/备件/省电)等特点,将是未来汽车装配生产线上应用的主要设备。其中频点焊的质量和效率均远高于工频焊接,主要表现在以下几方面:
(1)减少生产节拍机器人与焊钳同步协调运动,大大提高了生产节拍,使焊点间及障碍物的跳转路径最小化;可随意缩短电极开口减小关闭焊钳时间;焊接开始信号发出后可更快、更好地控制加压;更快地更改焊接压力,其压力调节速度可达200kgf/cycle(98N/ms);能够很好地避免和抑制飞溅,有效保证和提高焊接质量;焊接完成信号发出后可更快打开焊钳;减少电极更换及修磨时间;换枪、电极修磨及更换后快速标定。
(2)提高焊接质量软接触可实现极少的产品冲击,还可以减小噪声;高精确度的可重复性加压;焊接中精确恒压控制;焊接过程中压力可实现调整;更稳定的电极管理及控制等。
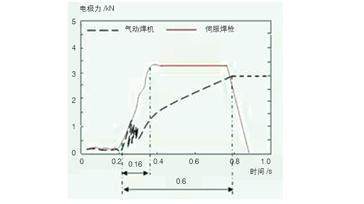
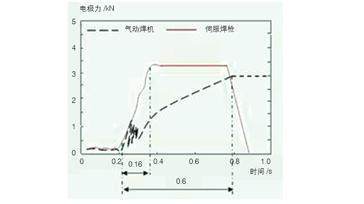
相对气动焊枪,伺服焊枪的渐进和预压过程是影响焊接效率的两个关键阶段。可编程电极行程和速度可以缩短同一工位上多个焊点的渐进时间,也可以提高焊接生产率。以预压为例进行分析,下图所示为气动焊枪和伺服焊枪在焊接过程中电极力的变化,假定达到设定预压力,电极力将保持恒定。如表所示,伺服焊枪焊接的一个焊点可节省0.44s,以一台轿车约3500~5000个焊点为例,将节省26~37min的焊接时间,生产率得到极大提高,车身焊装线的生产能力大大提升。

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-18 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
- 2024-09-18
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









