




-
fanuc机器人指令大全有什么?
提问:ii | 时间:2022-10-22 22:03:59
标签:发那科;发那科机器人,机器人指令
回答者:问答小助手 | 时间:2022-10-24 14:42:54
FANUC工业机器人的动作指令主要由四部分组成:动作类型、位置数据、移动速度和定位类型。其中,动作类型是控制机器人的轨迹。位置数据用于保存机器人的目标位置。不同的动作类型对应于不同的移动速度表达式。最后一种定位类型限制机器人到达目标点时的轨迹状态。fanuc机器人指令大全有什么?
(fanuc机器人)
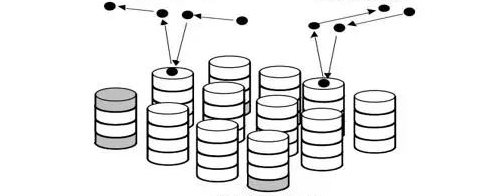
1.叠加函数的定义
教几个有代表性的点,即工件可以从下层到上层依次堆叠。
2.堆叠类型
堆叠B:包括堆叠B(单路径模式)和堆叠BX(多路径模式),适用于恒定工件姿态,堆叠时底部形状为直线或四边形。E:它包括堆叠E(单路径模式)和堆叠EX(多路径模式)。适用于复杂堆叠模式(工件姿态变化,堆叠时底部形状不是四边形)。
3.堆叠说明
(1)堆叠指令格式:根据堆叠寄存器的值,根据堆叠模式计算当前堆叠点的位置,根据路径模式计算当前路径,并覆盖堆叠动作指令的位置数据。
(2)堆叠动作命令:以接近点、堆叠点和回归点的路径点作为位置数据的动作命令是堆叠的特殊动作命令。每次通过堆叠命令重写位置数据。
(3)堆叠寄存器:用于堆叠控制。指定堆栈点、比较、分支等。
fanuc机器人指令大全有什么?FANUC工业机器人的位置数据也分为两种PR位置存储器:P位置变量和P位置变量。无论哪种位置变量,其存储形式可分为正交形式和关节形式。在正交形式中,XYZ也称为位置信息,WPR称为姿态信息,即控制TCP角度。同时,应注意,所有P都属于特定的工具坐标系和用户坐标系。因此,当系统提示教材不一致时,通常会替换工具坐标系或用户坐标系,需要重新记录位置。在关节形式中,直接保留所有轴的角度信息,其位置值也属于相应的工具坐标系和用户坐标系。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

