




-
安川机器人基础解析?运动命令有哪些?
提问:土豆 | 时间:2022-10-31 16:30:04
标签:安川,安川机器人,机器人解析
回答者:智能小助手 | 时间:2022-11-01 14:43:42
安川机器人坐标介绍
(安川机器人)
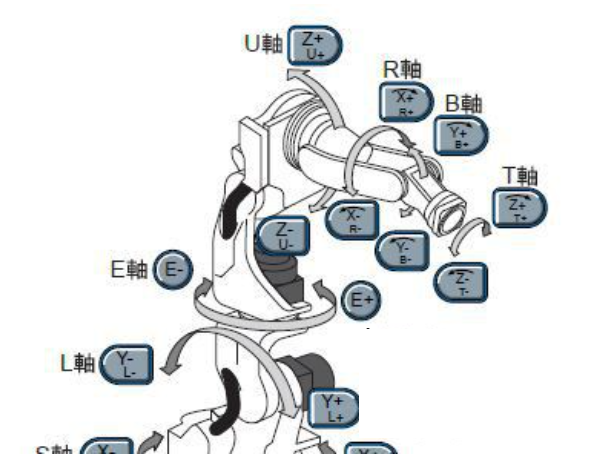
上图显示了MOTOMAN六关节机器人,由腰部关节机器人组成。前臂关节U和腕关节R、B、T组成。因此,机器人终端致动器的空间位置可以表示为P(S,L,U,R,B,T),其中S,L、U,R、B,T机器人关节相对于关节零点的坐标。此外,在直角坐标系下,位置P也可以表示为P(X、Y、Z、TX、TY、TZ),其中X、Y和Z表示点P的位置,TX、T、TZ表示点P的位置。
(安川机器人)
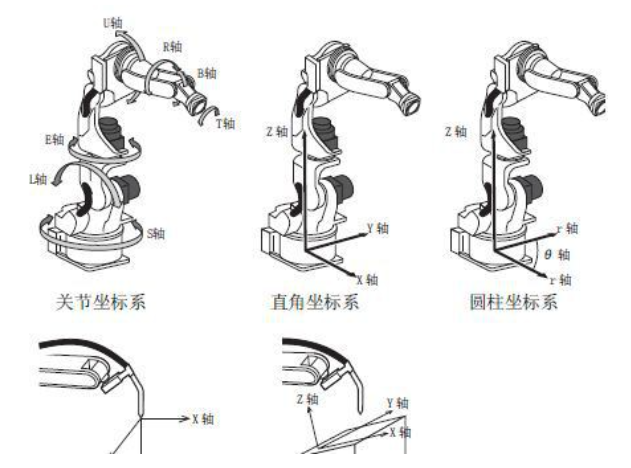
MOTOMAN内部坐标与关节坐标系有关。机器人坐标系有四种基本坐标系和用户坐标系,最后三种是直角坐标系。教学过程中保存的点由关节坐标表示。用户可以在机器人内部建立自己的用户坐标系。教学结束后,使用内部指令将教学文件(指定作业)转换为用户坐标系下的相关文件(相关作业),以便获得用户坐标系中教学点的坐标。这样,在用户坐标系中进行一些处理非常方便。
安川机器人运动控制指令简介
1.点到点控制(简称PTP控制)
该方法仅控制机器人操作员的起点和目标点的位置和姿势,但不控制从起点到目标点的轨迹。其特点是:仅保证有限中点和终点的位置精度,控制方法简单,运动速度快。大多数使用这种运动控制模式的机器人用于点焊、材料处理和机器人空转。
2.连续路径控制(简称CP控制)
该方法基于连续运动的轨迹,可以将机器人控制在指定的速度。它的特点是可以保证规划路径的每个点的位置精度,运动稳定,但控制方法相对复杂。使用这种运动控制模式的机器人主要用于弧焊、切割和其他操作。
对于MOTOMAN,主要使用六关节焊接机器人PTP控制和CP控制。
内部机器人运动命令主要包括:
1.MOVJ(关节运动)
此命令属于点控制。它只控制起点和目标点***的位置和姿势,而不关心移动过程中的实际路径。移动时,关节电机同时启动和停止,通常用于调整位置时调整空行程。
2.MOVL(线性运动)
该命令属于连续轨迹控制,实现点之间的线性运动。中间点的位置通过插入两个点来确定,从而实现***线性移动。
3.MOVC(圆弧运动)
该命令属于连续跟踪控制。首先,将空间教学的三个点插入圆弧中,以拟合机器人的圆弧运动轨迹,然后根据轨迹实现机器人的连续位置控制。
在MOTOMAN中,机器人内部的运动控制格式通常为:
移动*PT,V
其中MOV*表示MOVJ、MOVL、MOVC,PT表示相应的机器人示教点,V表示机器人移动的平均速度。
总结使用MOTOMAN机器人的经验,发现MOVL指令的执行是在标称时间内完成的(标称时间是根据两点之间的距离和标称速度,=ts/v获得的),即MOVL命令在整个执行过程中加速,在标称时间之内完成匀速和减速。两个MOVL指令执行期间的平滑速度不影响实际执行时间等于标称时间。这为定位器和机器人的后续控制提供了在标称时间内移动以实现协调操作的可能性。在随后的电弧协调焊接中,组合机器人的焊接轨迹,然后根据设定的标称速度获得标称时间。最后,根据标称时间控制定位器的运动,以实现机器人时间的统一。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

