




-
工业机器人系统安装调试一般步骤有哪些?
提问:小爱 | 时间:2022-11-15 10:09:02
标签:机器人系统,安装调试,步骤
回答者:智能小助手 | 时间:2022-11-16 10:58:05
最近,在工业机器人市场,调试工作相当流行,单个项目经常同时调试几十个机器人,日薪1500-2000元。拥有如此巨大的市场需求和丰厚的收入有多难?
就像一部新手机一样,我们做的第一件事不是用它打电话,而是安装我们通常需要的软件。工业机器人也是如此,但它们的安装和调试要比手机复杂得多。
以ABB码垛机器人为例,介绍了工业机器人安装调试的13个步骤。
1、 安装机器人
在安装机器人之前,首先检查设备是否缺失,并用眼睛观察机器人是否完好无损。然后安装控制柜并用叉车或起重机提升机器人本体。最后,连接机器人本体和控制柜。机器人和控制柜之间的连接主要是电机电源电缆、转数计数器电缆和用户电缆之间的连接。
2、 设置语言
当机器首次通电时,默认语言为英语,需要将其更改为中文以便于操作。
单击左上角的“ABB”图标
单击“控制面板”
单击“语言”
选择“中文”并单击“确定”
选择“Yes”(是)并等待机器人重新启动,然后完成语言设置
3、 备份和恢复
定期备份机器人以确保其正常工作是一个好习惯。备份文件可以放在机器人内部的内存中,也可以备份到USB闪存中。
备份文件包含正在运行的程序和系统配置参数。当机器人系统出错时,您可以通过备份文件快速恢复备份前的状态。在更改程序之前,请务必进行备份。应该注意,备份和恢复数据是唯一的,不能从一个机器人恢复到另一个机器人。
4、 校准
机器人的每个关节轴都有一个机械原点位置。在以下情况下,需要更新机械原点位置的旋转计数器:
更新伺服电机转速计数器的电池后
维修后,当转数计数器出现故障时
断开转数计数器和测量板后
断电后,机器人的关节轴移动
当系统报警提示“10036旋转计数器未更新”时
5、 系统I/O配置和接线
抓斗的电气原理图对此进行了说明。
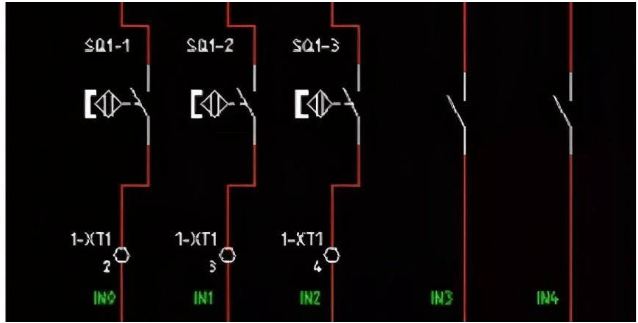
机器人信号输入部分示意图,包括704位置24V+、703位置24V-。输入信号包括夹持器开始位置、夹持器结束位置、压板结束位置、抓包辊道就绪和托盘就绪,共计五个。
前三个是气缸磁开关检测信号,后两个是为支持PLC准备的信号,以传输至机器人袋和托盘。为了实现电气隔离,从PLC到机器人的液位信号需要转换为机器人自己的液位,这需要通过继电器实现。
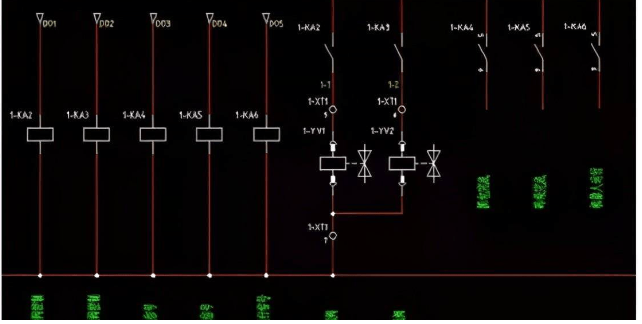
输出部分的原理图如下,也是五个输出,即抓取电磁阀、压袋电磁阀、抓取完成信号、堆垛完成信号和机器人操作信号。
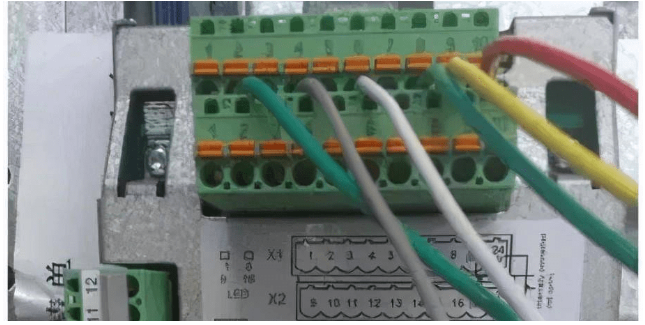
通常,通信板DSQC652为我们提供一个通信接口,其每个接口对应于一个输入或输出。
该图显示了DSQC652通信板。顶部和底部有两排端子,包括16个数字输入和16个数字输出。每个接口对应一个地址。例如,X1.1对应于数字输出No.0地址(do0),X1.2对应于数字输入No.1地址(do1),X3.1对应于数码输入No.0的地址(di0),X3.2对应于数码输出No.1的地址(di1),以此类推。每个端子块的9个连接到线路703(COM),10个连接到线704(+24V)。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

