




-
如何学习工业机器人的基础编程?
提问:军军 | 时间:2022-08-02 10:30:58
标签:工业机器人基础编程
回答者:智能小助手 | 时间:2022-08-03 17:58:30
如果你对机器人有一个基本的了解,你可能迫不及待地想学习这个知识点——下面以ABB机器人编程为例
让我们学习如何通过编程来控制它ABB机器人。
首先,我们需要正确的ABB简单了解机器人的编程框架,以及任务、模块、程序等相关核心术语。
先通过这个RAPID程序结构对程序有一个简单的理解(如下图所示)

RAPID程序结构
从这个图中可以看出,任务、模块和程序是组成的RAPID程序的核心部分,从上到下,也代表着优先顺序:先创建任务,再创建用户模块,最后在模块中创建和编辑程序。
好了,在了解了基本的程序框架之后,再来了解任务、模块、程序等关键词。
首先,是任务。
任务是机器人程序。该程序由一组模块(由程序模块和系统模块组成)组成,其中包含完成特定操作所需的所有指令和数据。例如,该机器人用于焊接或堆垛。任务可以单独执行,也可以与其他程序一起执行。RAPID程序中只有一个任务。在多任务复杂系统中,可以使用特殊的多任务(Multitasking)同时执行多个任务的软件选项(例如:在后台处理逻辑的程序)
二是模块。
模块分为程序模块和系统模块两类。
程序模块:程序模块RPAID对于程序的主体,他需要一个程序员根据工艺要求进行编程,一个任务可能有多个程序模块。在程序模块中,主程序所在的模块通常被称为主模块(MainModule)。除主模块外,其他程序模块均为子模块。属于模块的程序都是子程序。主程序负责组织、管理和调度子程序。
RAPID程序模块由例行程序组成(Routine)和程序数据(programdata)它由两部分组成:程序是指令集合,用于定义机器人动作;程序数据用于定义指令操作数的值(value)。
系统模块:用于定义系统模块ABB机器人的功能和系统参数。对于同一机器人制造商来说,机器人控制器实际上是一种通用设备,可用于不同用途、规格和功能的机器人控制。因此,当控制器用于特定的机器人控制时,需要通过系统模块来定义机器人的个性化参数,如硬件、软件功能和规格。系统模块由系统程序和系统数据组成。它是由机器人制造商准备的,可以在系统启动时自动加载。即使操作程序被删除,系统模块也将保留。
系统模块包含一组类型定义、数据声明和常规程序。系统模块包含适用于机器人系统的数据,无论加载的程序模块如何。
最后,是程序。
程序分为三类:普通常规程序、中断程序和功能程序,其中普通常规程序使用较多,中断和功能使用的频率相对较低。在后续学习中介绍了中断程序和功能程序。
在对任务、模块和程序有了基本的了解之后,我们就可以对具体的编程指令的组成有一个基本的了解,这样我们就可以对其有一个基本的了解MOVEL(线性运动)为例。
如下图所示:
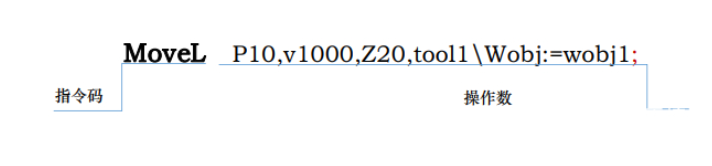
其中,MOVEL指令代码,代表线性运动,指令是线性运动的指令。P10,V1000等数据都是操作数,至于每个操作数的含义是什么,后续会在程序中具体说明。
有一点不同于PLC编程,机器人编程必须首先声明变量。
在PLC可以先使用编程IO点,然后具体IO定义点,但是在ABB在机器人中,需要先声明变量,否则,程序会出现错误,所以,在ABB在机器人编程中,首先要养成先声明变量再编程的习惯。
至于什么是变量,以及如何声明变量,需要的朋友可以提问,我会给出详细的解答
今天,先分享了工业机器人基础编程教程,大家可以收藏使用



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

