




【干货】并联机器人的进化史

依据运动学结构,可将机器人分为串联机器人、并联机器人和混合机器人三大类别。其中,串联机器人由一组开环运动链组成,并联机器人由一些闭环运动链组成,混合机器人则同时包含了开环和闭环运动链。
虽然并联机器人出现时间较串联机器人晚,但其无论在学术理论,还是实际应用上都填补了一些行业空白。在发展历史中,并联机器人的优点正被慢慢凸显出来。
落实到具体的方面,串联机器人是工业应用场景中最常用的类别,其主要优点是对于其较小的自身体积和所占的地面范围而言,拥有很大的工作空间,缺点在其由于开环运动学结构导致其刚度较低和惯性较大。
反观并联机器人,由于其闭链的运动结构,具有高刚度,高承载力;且驱动电机多安装于定平台,故具有惯性小,速度快的优点。再加上某些机器人的特定工作空间,并联机器人在实际工程中找到了独特的用武之地。
1、Stewart机器人
Stewart机器人可以说是最经典的并联机器人,也是世界上出现的第一种并联机器人。这类机器人最初由Gough在1947年发明,被用于检测各种载荷条件下的轮胎磨损。
将Stewart与Gough联系在一起是源于Stewart在1965年发表的一篇论文中,提及了Gough的工作和这种平台的图像,这篇论文对并联机器人运动学的发展产生了重要的影响。基于此,这类构型的并联机器人也被称为Gough-Stewart机器人。
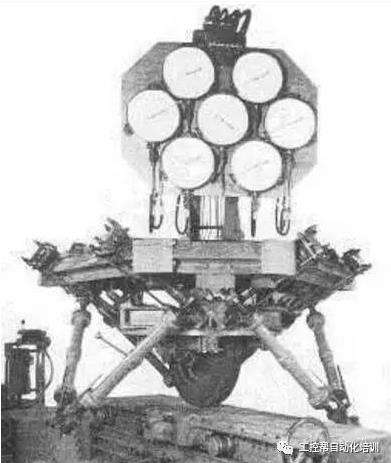
Gough发明的六自由度平台
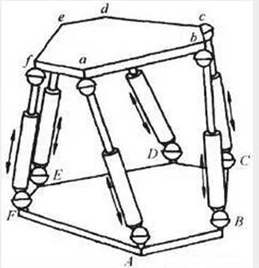
该机器人为六自由度,有六条支链,每条支链的两端为球副,中间由一移动副联接两杆。由于其刚度高和重负载的优点,Stewart机器人常被用于各种重载的模拟台,例如飞行模拟器、地震模拟台、航天对接装置,以及用于确定组合载荷下轮胎的性能等;在民用方面的应用包括电影座椅等。
Stewart机器人
飞行模拟器

运动模拟台
现在国内生产Stewart平台相关产品的机构主要有航天科技集团(航天器对接机构)、福云天翼(模拟台)、若贝特(模拟台)等。
2、Delta机器人
另一种具有跨时代意义的并联机器人——Delta机器人发明于20世纪80年代,发明人为Reyrnond Clavel。这种新型机器人发明的初衷是,以非常高的速度操纵轻而小的物体。1991年,Reyrnond Clavel提交了自己的博士论文,同时为Delta机器人申请了专利。他在1999年获得了金机器人奖,以表彰其在Delta机器人领域的贡献。
1999年,ABB开始销售Delta机器人。直到其专利在2012年解禁后,国内的机器人企业才开始生产并销售Delta机器人。ABB也成为了现在国际上做delta机器人最成熟的公司,目前国内出货量比较多的厂商有阿童木机器人、勃肯特机器人、李群自动化等。
Delta机器人是最经典的少自由度机器人,也是在实际工业中应用最广泛的一种并联机器人。三自由度Delta机器人由三条支链组成,其关键之处在于使用了平行四边形结构,可以保证末端执行器的姿态。

Delta机器人
Delta机器人的最大优势是速度快,业内勃肯特的高速并联机器人标准节拍已达到433次/min,超过了国外品牌,可见Delta机器人很适合用于抓取搬运小重量物体,所以被大规模应用于食品、医药、3C等领域。
不仅如此,在传统Delta机器人的基础上,还有许多变种,在保留其高速的情况下,给予机器人更多的自由度,以满足工程需要。
(1)在机器人的定平台中心加一个UPU支链,使其变成一个四支链四自由度的机器人,增加了一个垂直于动平台的转动。
(2)在动平台上增加一个小转动电机等,从而增加机器人的自由度,其在自由度上与上一种变种机器人相同。

(3)Adept Quattro机器人,在Delta机器人三支链基础上增加一个支链,使其变成四驱动三自由度的冗余机器人,与同类型机器人相比,其高效率可节省23%的能耗,同时速度在delta的基础上还可以大大增加。

Adept Quattro机器人
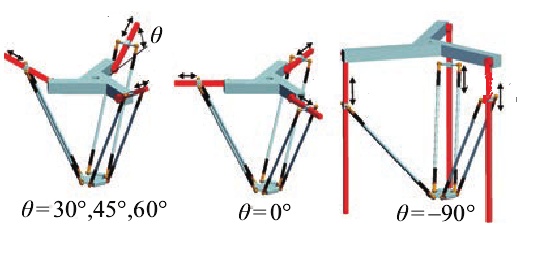
(4)Delta机器人还可以将其提供驱动的转动副变为移动副,移动副可以与动平台形成不同的角度,分别为移动副与动平台平行、移动副与动平台成任意角度、移动副与动平台垂直。其中前两者仍然用于搬运抓取,而后者常用于3D打印机。

3D打印机
(5)此外,在将驱动关节改成移动副的基础上,三条移动副还可以设计为不对称的形状,将三条移动副轴线设计为三条平行的直线,也是Delta机器人的变种之一。

直线delta
3、五杆机器人
五杆机器人是最简单的并联机器人,具有两个自由度,可以在平面上做二维移动,通常与平行四边形机构配合使用,以保证末端执行器的姿态不变。在实际工业应用中,主要应用于食品、医药、3C等领域的搬运。

五杆机器人
4、灵巧眼
灵巧眼机器人具有三自由度,其动平台可以做三维转动。该机器人共有三条支链,每条支链有两个杆、三个转动副,机器人的所有转动副的轴线会交于一点。基于此特点,动平台只会绕此点做三自由度转动运动。
由于灵巧眼机器人特有的运动学和工作空间的特点,常被应用于机器人眼球、卫星天线、机器人肩关节、腕关节等场合。
灵巧眼机器人
除了上述并联机器人外,还有用于盾构机的管片拼装姿态微调的3-SPS-PS机器人、用于硅片搬运的支链嵌套并联机器人(专利公开号:101259616A)等。
事实上,在民用领域,被大规模应用的并联机器人只有Delta机器人和五杆机器人,而Delta机器人基本成为了并联机器人的代名词。即使扩展到航空航天和军事领域,比较常用的并联机器人也只能再加上Stewart机器人。
值得一提的是,并联机器人的实际应用并不仅限于此,例如3-SPS-PS机器人和支链嵌套并联机器人等由于其工作空间的特点,在工程应用上也有很大的潜力。
构型上的改变属于机器人最底层的改变,而机器人行业研发成本高、周期长,工业又以营利为目标,因而更倾向于求稳,所以即使是四大家族级别的大机器人厂商,对待新的、不同构型的机器人亦十分谨慎。这也是很多并联机器人的构型在工程实际的潜力并没有得到完全挖掘的原因。

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2022-08-03 10:20:40
- 2022-08-03 10:20:40
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









