





【AUBO&技术】协作机器人3D抓取应用技巧

随着协作机器人在工业领域的大量使用,对机器人机器人的操作、应用拓展、深度开发的需求也在不断增加,机械臂有了“手”、“眼”、“腿”……成为可以协助人工完成更多使命的工作伙伴。同时也就对与机器人合作的人员有了更高要求。今天我们就来聊聊机械臂如可配合3D视觉抓取的实用脚本编程技巧!干货爆棚,快准备好小本本记重点吧!
01目标
实现通过机器人示教器完成3D视觉定位机械臂抓取无序物体分拣的动作规划。
解决问题
机器人配合3D视觉抓取 http://aubo-robotics.cn/NewsDetail/689663.html,准备点如何计算才能保证机器人取料路径(准备点->吸取点)垂直于吸取平面,如下图?

02思路
1、工具坐标系Z轴和flange_center坐标系Z轴平行
2、创建一个虚拟的TCP(将实际工具坐标系运动学参数Z增加),让虚拟TCP运动到给定坐标,实际TCP则在吸取平面法线上。
3、然后把工具坐标系切回实际TCP,再移动到给定坐标,即可实现取料路径垂直于吸取平面。
03工作流程
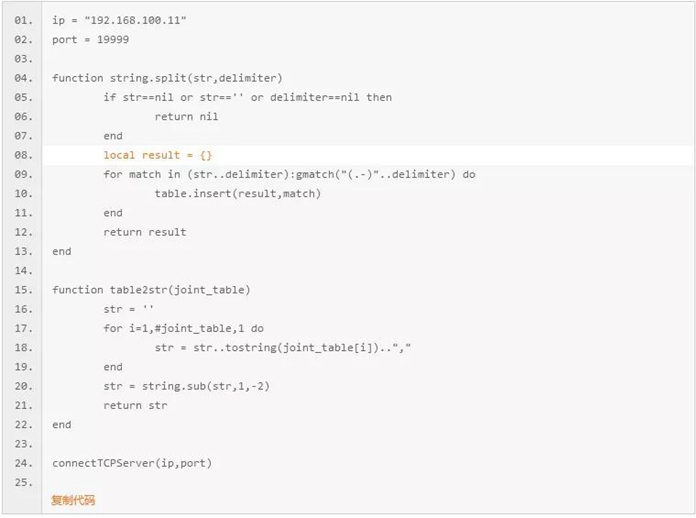
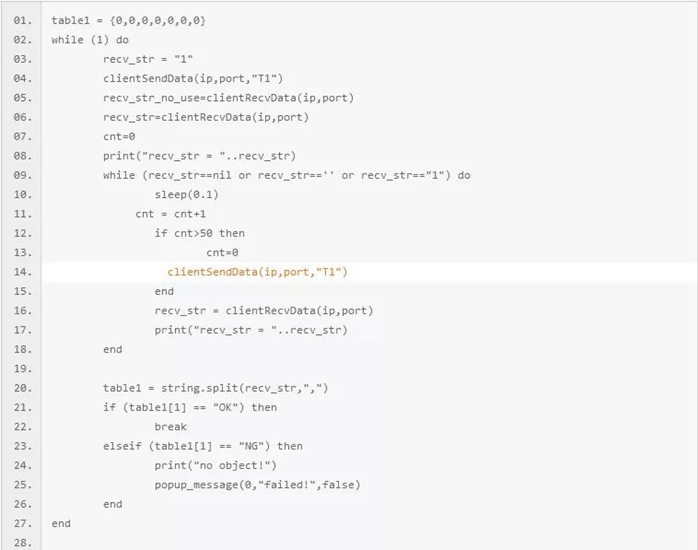
机器人和相机(工控机)之间走TCP/IP通信,机器人做为client,相机作为server。
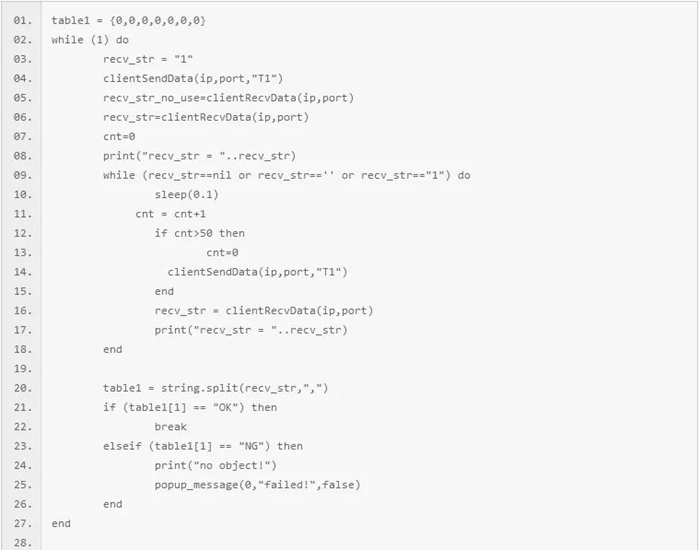
1、机器人给相机发送“T1”,触发相机拍照。
2、相机拍照成功返回“OK,0,0,0,0,0,0”。首位ok,后六位为x,y,z,RX,RY,RZ。x\y\z单位m,RX\RY\RZ单位deg。
04程序分享
1、新建路点变量

2、机器人工具运动学参数

3、工程
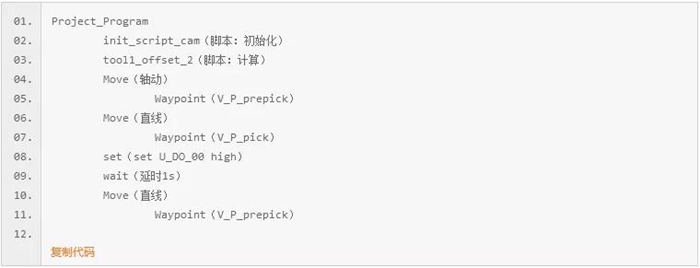
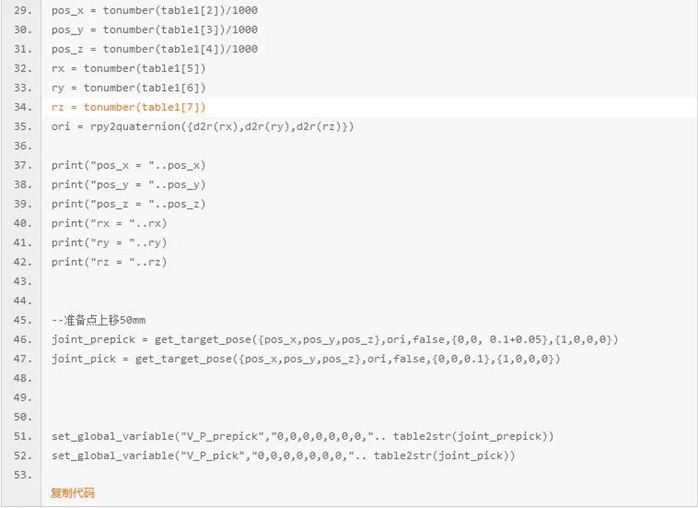
脚本init_script_cam.aubo
脚本tool1_offset_2.aubo
运行效果:
05问题:
如果工具坐标系Z轴和flange_center坐标系Z轴不平行,该如何实现同样功能?
例如TCP运动学参数为
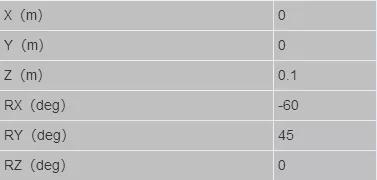
06思路:
通过旋转变换把 工具坐标系的Z轴偏移 换算成flange_center坐标系下的XYZ位置偏移,然后补偿进原TCP参数中获得一个新的TCP运动学参数。
07操作:
把tool1_offset_2脚本修改如下
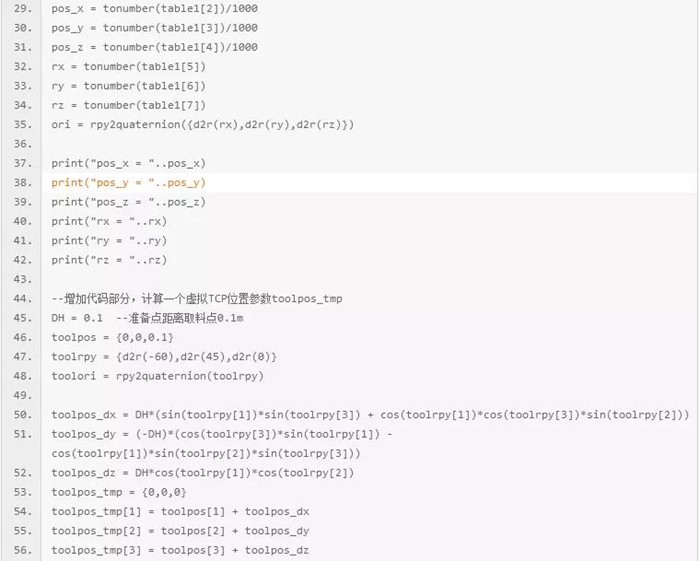
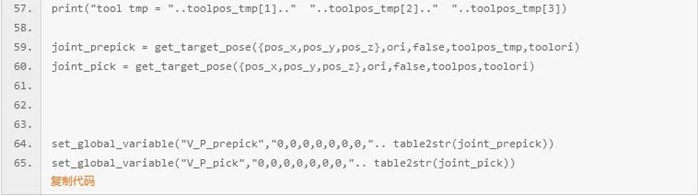
运行结果:

图文:遨博FAE团队

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
重新定义精密制造!富唯智能高精度装配人形机器人引领智造革命
关键字: 人形机器人 2025-06-11 -
灵途科技入选武汉市骨干高企瞪羚计划,科技创新实力再获认可
关键字: 灵途科技 2025-06-11 -
德承嵌入式工控机DX-1000:弓网监测系统守卫轨道交通的行驶安全
关键字: 工控机 2025-06-11 -
人形机器人为什么要定制? ——揭秘工业场景的"千面需求"破局之道
关键字: 人形机器人 2025-06-10 -
DexHand021 Pro:高自由度(DOF)≠灵巧度(Dexterity),灵巧智能发布行业首个量化指标定义灵巧手
关键字: 灵巧手 2025-06-10
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00




- 2024-02-21 11:53:55
- 2020-12-07 16:42:13
- 2023-06-05 09:00:00
- 2020-08-06 13:07:09
- 2022-04-19 12:51:08
- 2020-08-18 14:50:35
- 2022-08-03 10:20:40
- 2022-08-30 14:45:07
- 2022-10-10 07:16:03
- 2022-12-21 09:37:00
- 2024-06-17 13:17:05
- 2022-08-04 21:44:20
- 2025-06-10
- 2025-06-06
- 2025-06-06
- 2025-06-06
- 2025-06-06
- 2025-06-06
- 2025-06-05
- 2025-06-05
- 2025-06-05
- 2025-06-05









