





机器人小知识——位置寄存器指令介绍

1. 位置寄存器介绍
位置寄存器是用来寄存位置信息的变量,标准情况下有100个位置寄存器。位置寄存器包含2种位置数据形式(如表1所示),一类是关节坐标值,另外一类是直角坐标值。
表1 位置数据形式介绍
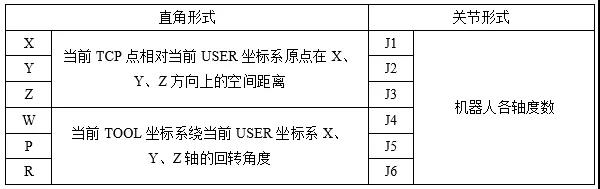
若是只想找位置寄存器中的某一个要素,则需要借助位置寄存器要素指令PR[i , j]来实现。其中,“i”表示位置寄存器号码,“j”表示该寄存器中的要素号码,j∈[1,6],具体对应关系如表2所示:
表2 位置寄存器要素对应表

2. 使用指南
STEP1:设置位置寄存器
位置寄存器在使用之前需要先进行定义,定义方式有两种:
(1)寄存器设置界面直接定义;
(2)程序之中赋值或计算使用。
(1)寄存器设置界面直接定义位置寄存器

图1 DATA界面
1)按【数据】(Data)键,再按F1【类型】(TYPE)出现以上内容(如图1所示):
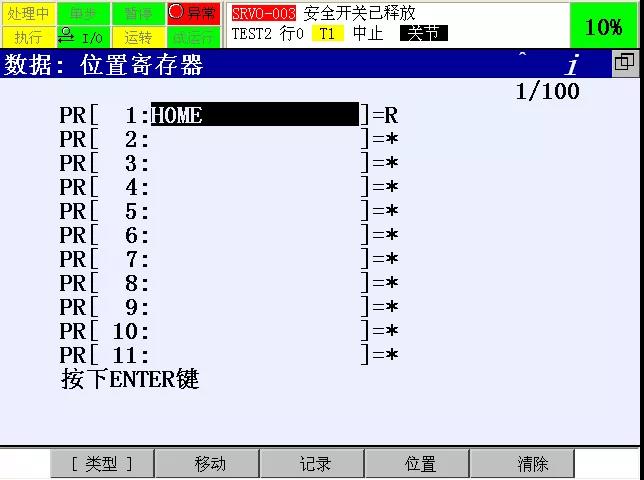
图2 位置寄存器设置界面
2)移动光标选择【位置寄存器】(Position Reg),按【回车】(ENTER)键后,界面如图2。
其中,“ R ”:表示已完成示教的位置寄存器
“ * ”:表示尚未示教的位置寄存器
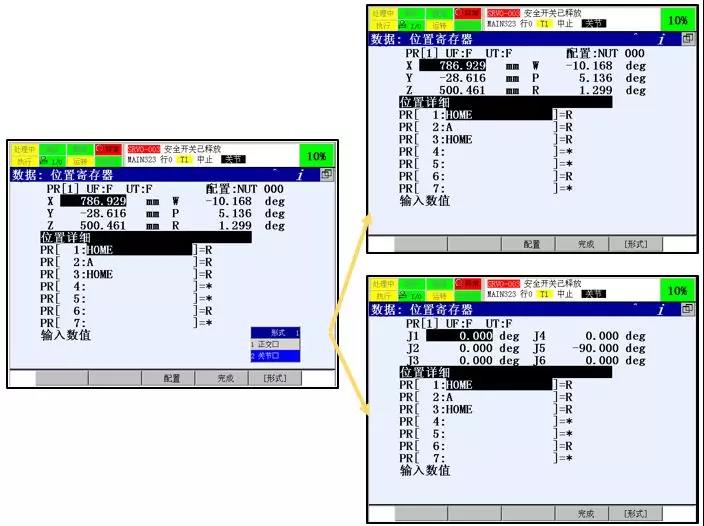
图3 位置数据的不同形式
3)在该界面下记录位置寄存器数据有两种方法,一是将机器人移动到所需点位,按【SHIFT】+【F3位置】(RECORD)键记录;二是已知需要寄存点位数据,先按【F4 位置】(POSITION)则按【F5形式】(REPRE)键,如图3所示,移动光标到所需要的形式并按【回车】(ENTER)键,或通过数字键,可以切换数据形式,将光标移动到数字位置即可直接修改;
其中,“正交(Cartesian)”:直角坐标系
“关节(Joint)”:关节坐标系
(2)程序之中赋值或计算使用
位置寄存器指令PR[i]和位置寄存器要素指令PR[i,j]都支持赋值和运算,由于代表的意义不同其赋值内容和支持的运算也不同。
其中,PR[i]可以将位置资料代入位置寄存器,赋值的内容如下图4所示。除此之外也可以进行四则运算,但只支持四则运算中的“+”,“-”运算。
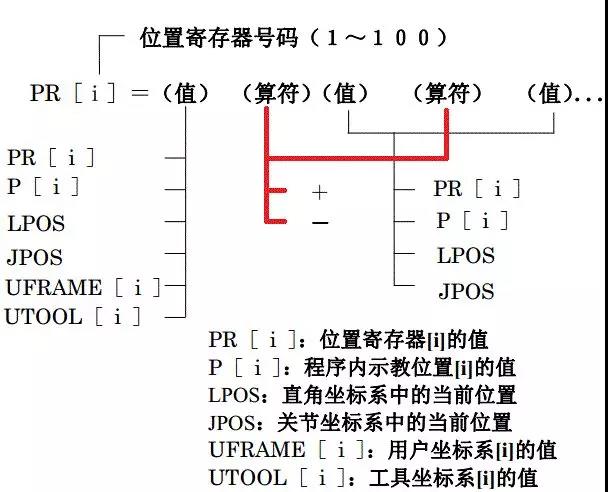
图4 PR(i)支持的代入和计算
PR[i,j]是进行位置寄存器的算术运算的指令,以与数值计算器指令相同的方式记述。因而其支持的赋值内容如下图5所示,支持运算有“+”,“-”,“*”,“/”四则运算和取整、取余。
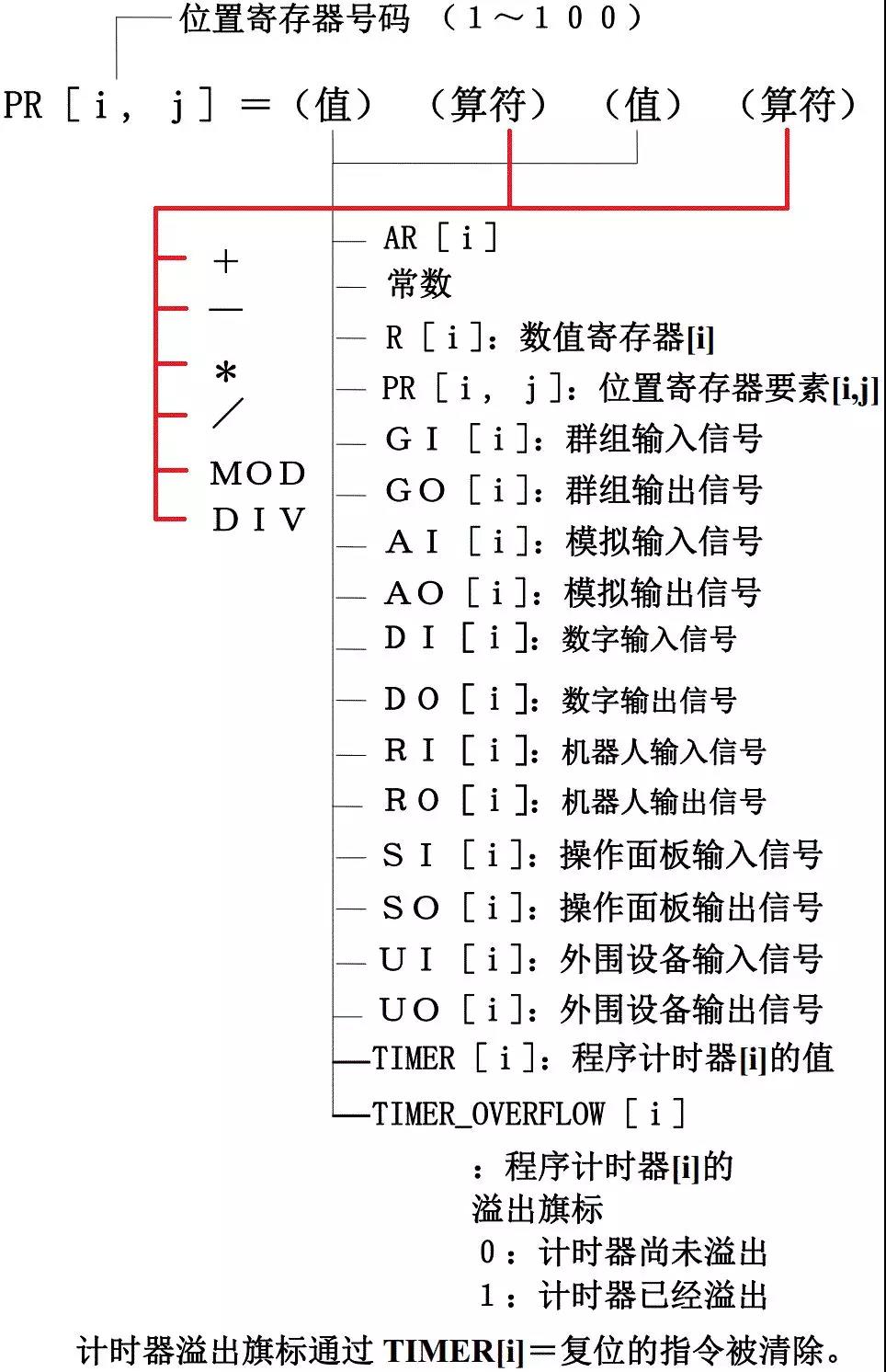
图5 PR[i,j]支持的代入和计算
具体操作步骤为:
1)在程序编辑页面中点击【F1指令】([INST]),选择【数据寄存器】(Registers),如图6所示:

图6 选择指令
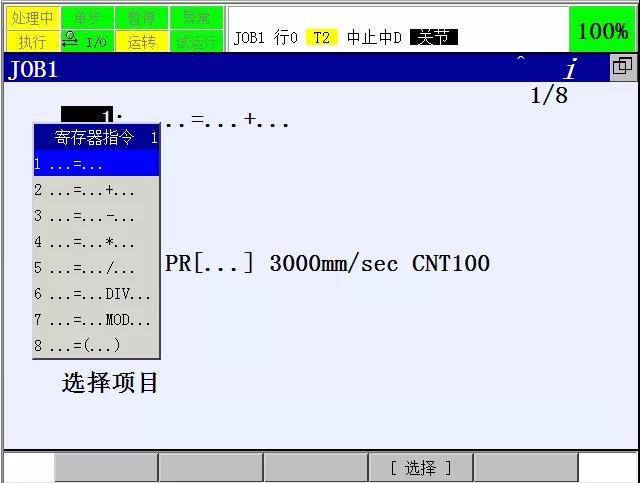
图7 先选择逻辑形式
2)为了实现赋值和运算,需要先选择一个合适的逻辑形式,选项如图7所示。移动光标选择所需计算方式。

图8 选择对象和值
3)如图8所示,根据需求,移动光标选择所需赋值对象及赋值内容即可。
STEP2:使用寄存器
寄存器设置完成后,调用即可。调用方式对应设置方式也有两种:
(1)在DATA界面直接使用;
(2)在程序中调用
(1)在DATA界面直接使用
1) 按【Data】键,再按F1【类型】(TYPE)出现以下内容(如图9所示):

图9 DATA界面
2)移动光标选择【位置寄存器】(Position Reg),按【回车】(ENTER)键后,界面如图10。
其中,“ R ”:表示已完成示教的位置寄存器
“ * ”:表示尚未示教的位置寄存器

图10 位置寄存器设置界面
3)移动光标至STEP1中已设置好的寄存器所在位置,按【SHIFT】+【F2移动】(MOVE TO),机器人移动到设置好的点位,在此过程中请不要松开【SHIFT】键。
(2)在程序中调用

图11 程序编辑界面
1)如图11所示,点击【EDIT】快捷键,进入程序编辑界面,移动光标至点位信息要素位置,点击【F4选择】(CHOICE)出现以上内容。移动光标选择以PR形式记录点位信息。
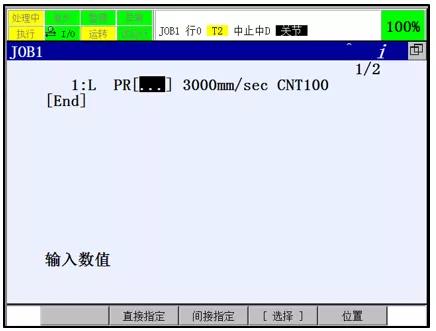
图12 采用PR形式代表位置信息
如图12所示,选择PR形式,此时动作指令就修改成为用PR来表示位置信息要素的形式。直接在光标所在位置处输入STEP1中已设置好的位置寄存器编号,即可实现位置调用。

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2019-08-30 17:44:29
- 2019-11-04 13:59:45
- 2022-08-03 10:20:40
- 2023-01-31 12:03:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









