





机器人寄存器的指令介绍和查看

一、机器人寄存器指令 Registers
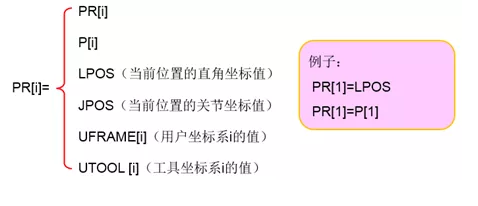
① 寄存器指令R[i] i=1~200
② 位置寄存器指令PR[i] i=1~100
③ 位置寄存器要素指令PR[i,j] i=1~100,j=1~6
其中,i表示寄存器的号码;j表示位置寄存器的要素号码;
若需要对默认寄存器数量进行扩展,可在控制启动模式中按图1所示完成设置:
(通过 PREV+NEXT+重启控制柜 进入控制启动(CTRL START)模式)
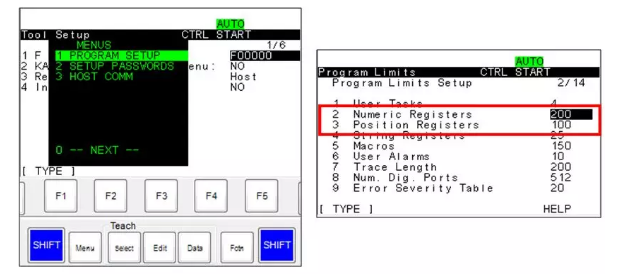
图1
(1)数值寄存器指令R[i]
数值寄存器指令支持“=”(赋值),“+”,“-”,“*”,“/”,“MOD”,“DIV”算术运算。

(2)位置寄存器指令PR[i]
位置寄存器指令支持“=”(赋值),“+”,“-”算术运算。
(3)位置寄存器要素指令PR[i,j]
位置寄存器要素指令支持“=”(赋值),“+”,“-”,“*”,“/”,“MOD”,“DIV”算术运算。

二、查看寄存器值
(1)查看数值寄存器的值
步骤:
1)按【Data】键,再按F1【TYPE】(类型)出现以下内容(如下图2所示):
Registers:数值寄存器;
Position Reg:位置寄存器;

图2
2)移动光标选择【Registers】(数值寄存器),按【ENTER】(回车)值键,如图3所示;

图3
3)把光标移至寄存器号后,【ENTER】(回车)键,输入注释;
4)把光标移到值处,使用数字键可直接修改数值。
(2)查看位置寄存器的值
步骤:
1)按【Data】键,显示右图4;

图4
2)按F1【TYPE】(类型),出现以下内容:
Registers:数值寄存器;
Position Reg:位置寄存器;
3)移动光标选择【Position Reg】(位置寄存器),按【ENTER】(回车)键,如右图5所示;

图5
4)把光标移至寄存器号后,按【ENTER】(回车)键 ,输入注释。
5)把光标移到值处,按F4【POSITION】(位置)键,显示具体数据信息;
“ R ”表示已完成示教的位置寄存器
“ * ”表示尚未示教的位置寄存器
6)按F5【REPRE】(形式)键,如下图6所示,移动光标到所需要的项并按【ENTER】(回车)键,或通过数字键,可以切换数据形式;
• Cartesian(正交):直角坐标系
• Joint(关节):关节坐标系
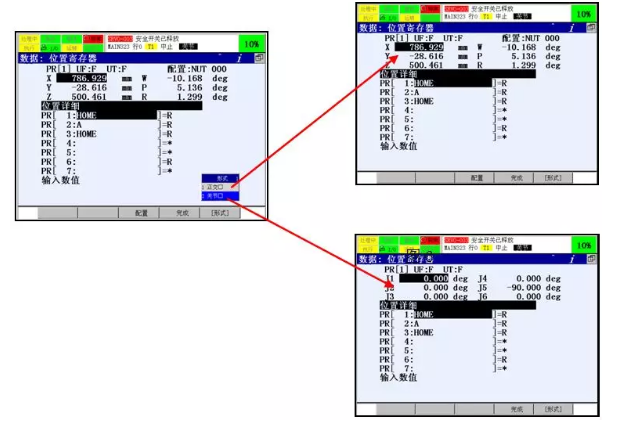
图6
7)把光标移至数据处,可以用数字键直接修改数据。

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-12-15 13:41:05
- 2022-12-25 00:00:00
- 2022-11-15 16:25:55
- 2024-05-21 09:59:56
- 2022-12-14 09:05:04
- 2022-08-03 10:20:40
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06









