





选择控制电机的11个小技巧

伺服电机和步进电机都是一种专门用于速度和位置精确控制的特种电机,它们一般都是需要对应的驱动器进行驱动控制,控制器(如PLC)将控制脉冲和方向信号发送给(伺服或步进)驱动器,再由驱动器驱动电机运转(包括启动/停止/加减速/匀速/换向等),从而达到对运动的精准控制,从而可以实现对位置的精准定位。
但它们仍有很大的差别,我们在实际选择时该选择伺服电机还是步进电机呢?下面将对它们进行详细的比较。

伺服电机
步进电机
1、控制
伺服电机有三种控制方式:位置控制、速度控制和转矩控制,分别对应位置环、速度环和电流环。其中位置控制一般是通过外部输入脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,故可以进行精确地定位;速度控制一般是通过模拟量的输入(电压信号的大小确定转速的大小,电压信号的方向确定转动的方向)或脉冲的频率(脉冲的频率确定转速的大小)来控制;转矩控制是通过外部模拟量的输入(电压信号)或直接的地址的赋值来设定电机轴对外的输出转矩的大小,可以保持电机工作在一定转矩下,但其速度和方向会有变化。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。通过改变电机绕组的通电相序可以改变电机转动方向。

伺服电机闭环控制系统
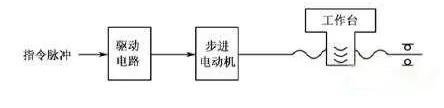
步进电机开环控制系统
2、速度
交流伺服电机的额定转速常用的有2000rpm和3000rpm,最大转速能达5000rpm;
步进电机转速一般在300-600rpm。
它们都可以通过控制脉冲频率来达到调速的目的。
3、反馈
伺服电机由于自带编码器,它可以对自己的运动状态进行反馈给驱动器,驱动器会进行自动补偿,从而自动调整其输出的控制信号,故能对伺服电机进行更为精确的控制。故伺服电机一般为闭环控制系统。
而步进电机是不带编码器的,无反馈功能,故步进电机一般为开环控制系统。但是其也可以外接编码器来达到闭环控制,一般少用而已。
4、控制精度
伺服电机控制精度由编码器的分辨率决定,分辨率越大,精度越高,一般要求分辨率比系统要求的定位精度高一个数量级。伺服电机的定位精度可达0.001mm;
步进电机控制精度由步距角决定,步距角越小,精度越高,一般要求步进电机的一个步距角对应于系统要求的定位精度的1/2或更小。一般步进电机的精度为步距角的3~5%,且不累积。
控制电机的控制精度要比伺服电机低大约10倍。
5、低频特性(即较低转速时电机的性能)
交流伺服无论在高速还是低速都能保持平稳运行,即无噪声和振动;
而步进在低速时易出现噪音、振动(抖动)现象,导致机构不稳定和影响精度。
6、矩频特性(即转速变化时力矩的变化情况)
伺服电机为恒力矩输出,即在其额定额定转速以内,都能输出额定转矩,在额定转速以上为恒功率输出;
而步进电机的输出力矩会随转速升高而下降,且在较高转速时会急剧下降,所以其最高工作转速一般在300~600rpm。
7、过载能力(即超重超负荷运行时电机的情况)
伺服具有较强的过载能力(允许短时过载,不允许一直过载),其最大转矩可为额定转矩的三倍,可用于克服惯性负载在启动瞬间的惯性力矩;
步进一般不具有过载能力。其启动扭矩一般约为额定扭矩的70%。
8、运行性能
伺服为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,故能使电机控制更为精确和稳定;
步进为开环控制,启动频率过高或负载过大易出现丢步或堵转的现象,停止时转速过高易出现过冲的现象,所以为保证其控制精度,应处理好升、降速问题。
9、速度响应特性(即电机的加减速性能)
伺服从静止加速到额定转速(例 3000rpm)仅需几十毫秒,可用于快速启停的场合。
步进从静止加速到工作转速(例500rpm)需要200~400毫秒。
10、效率
伺服电机效率较高,一般在80%以上;步进电机的效率比较低,一般60%以下。
11、价格
拿一套中容量的电机系统(包括电机+驱动器),“步进电机+步进驱动器”一般要在1千左右,而“伺服电机+伺服驱动器”在三千左右。当然其价格变动还是很大的,对于同一型号的电机,不同的品牌,不同的供应商,不同的数量需求,甚至同一供应商对不同的客户,它都是有价格的不同的。总体来说,步进系统比伺服系统便宜个2~3倍。
来源:伺服与运动控制

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03


- 2018-08-24 15:06:29
- 2022-09-27 11:10:21
- 2020-09-07 09:44:17
- 2022-09-21 13:19:45
- 2018-08-30 18:46:03
- 2018-08-31 15:12:51
- 2023-04-11 13:04:29
- 2022-11-10 07:03:03
- 2023-04-17 06:41:28
- 2022-12-06 10:21:42
- 2022-12-06 16:03:02
- 2022-09-26 09:17:20
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









