





协作型机器人的核心部件 - 嵌入式高性能伺服驱动器

说起近些年火热的协作机器人,大家一定已经不陌生了。相比较传统的工业机器人,协作型机器人最大的特点就是它可以和人在共同空间中合作、互动、共同完成工作。因此,协作机器人在研发和设计时必须要考虑使其具备高安全性、高灵活性和高精度,且满足即插即用、编程简单直观、操作简单,让即使是非专业人员也能快速掌握并使用的特征。
当前国内外已有不少于数十家的机器人厂商均推出了协作机器人产品,与此同时,协作机器人的安全性高、灵活易用、与人协作等特性,也极大的吸引了部分制造企业开始尝试将协作机器人引入到生产线,完成精密装配、检测、产品包装、打磨、机床上下料等工作。
小型化、轻量型设计的协作机器人正在成为工业机器人的发展新趋势,中小企业借力协作机器人迈向工业4.0,成为推动工业机器人市场高速发展的重要驱动力,人机协作将更精准地助力智能制造。
今天,我们要和大家聊一聊的是要研发一款协作机器人,其中必不可少的核心部件 - 【嵌入式高性能伺服驱动器】。
熟悉协作机器人的朋友都知道,目前市场上主流的协作机器人绝大部分为串联型的6自由度机器人,有些厂商了开发了冗余性更高的7自由度机器人,但是不管是6自由度还是7自由度,就其本体结构来说,基本上都是先根据负载情况预制装配好一些单关节的关节模块,再将这些关节模块组装到一起之后即成为了一条完整的机械臂,而我们要讲的驱动器正是集成到这一个个的关节模块里面的。

这是搭建装配好的关节模块成品,我们来看一看爆炸图:

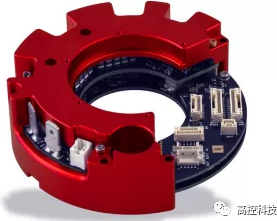
这其中绿色的部分,就是嵌入到关节内部的可以中空走线的高性能伺服驱动器,那么现在我们就向大家推荐几款适合于嵌入到关节模块内的伺服驱动器。
圆形驱动器
IES系列伺服驱动器

控制模式:
循环同步位置-速度-转矩
带有换向角的循环同步转矩
给定位置-速度-转矩,插值位置(PVT),回零
CVM:索引图形用户界面,支持可编程语言CPL
电子凸轮,电子齿轮
指令接口:
CANopen应用层协议通过EtherCAT(CoE)
ASCII和串行二进制
±10V位置/速度/转矩指令
主编码器(电子齿轮/电子凸轮)
通讯接口:
EtherCAT
串口
反馈接口:
端口1:差分信号
Biss-C单向,绝对值时钟与数据
SSI
端口2:单端信号
数字方波A/B/X
霍尔:
数字式U,V,W
I/O
1路数字量高速输入
1路模拟量电机过温输入
1路模拟量差分信号输入
1路数字量刹车输出
1路数字量缓冲输出
外形尺寸:
80 x 80 x 20 mm,中心孔径10mm,外框直径89.4mm
SOMANET Servo Node Circulo
系列伺服驱动器
产品描述:
额定电源电压:24-48VDC
最大电压:65VDC
持续相电流:24Arms
最大相电流:60Arms(负载周期:每1.5秒0.5秒)
最高效率可达99%
支持电机类型:无刷直流电机、永磁同步电机
相数:3
硬件保护:过流、过压、欠电压、过温、PWM死区时间、PWM直通
编码器接口:1路ABZ/SSI/BiSS-C/尼康/多摩川
制动器输出:1A、48V
通用IO接口:5路数字量输入输出(3.3/5V),1路数字量输出(3.3/5V),1路数字量输入(24V),1路单端模拟量输入(0-10V),1路差分模拟量输入(±5V)
散热片:铝
可选集成电机端编码器,可选集成负载编码器
可选集成制动器
重量:168g
外形尺寸:72.2 x 72.2 x 23mm
方形驱动器

SOMANET Servo Node系列伺服驱动器
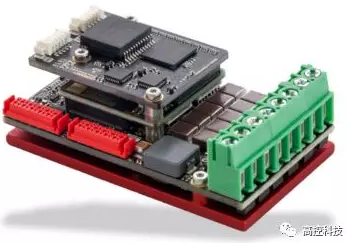
可提供415W、1040W及2080W三种规格的型号以应对不同的负载需求
产品描述:
单轴永磁同步电机(直流无刷电机)驱动器
制动器功率输出:可通过PWM信号控制(0-48V)
额定供电电压:12-48/60VDC
最大输入电流:48A
最大相电流:66Arms(Node 2000)
额定功率下效率可达98%
位置反馈接口支持(双端口):霍尔、正交编码器、BiSS-C、SSI、半双工、绝对值A格式
模拟量输入(辅助接口):2路单端0-10V、2路差分±5V(如果需要0-5V、0-10V、0-20V、±5V、±10V等信号需要提出硬件配置要求)
数字量IO:4路通用IO接口/SPI(要求)/I²C(要求)/通用异步收发器
重量:80g
外形尺寸:70 x 40 x 23mm
Gold Solo Twitter系列伺服驱动器
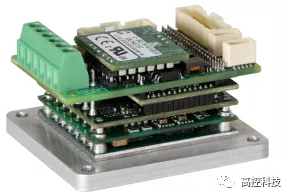
产品亮点:
超高电流:最大可达80A/80V、50A/100V
重量轻:仅有32.5 – 60.5g
超小型、超高效率、易于连接和使用
可通过EtherCAT或CANopen进行先进的网络控制
可通过USB(仅支持EtherCAT通讯版本)和标准的RS-232进行通讯
非常宽泛的输入电压范围:14V – 200VDC
可支持任何的反馈传感器在单、双端口和龙门环路的配置
整合了专利的“快速与软交换技术”使得效率可以高达99%以上,然而电磁干扰可以忽略不计
可提供的规格型号:
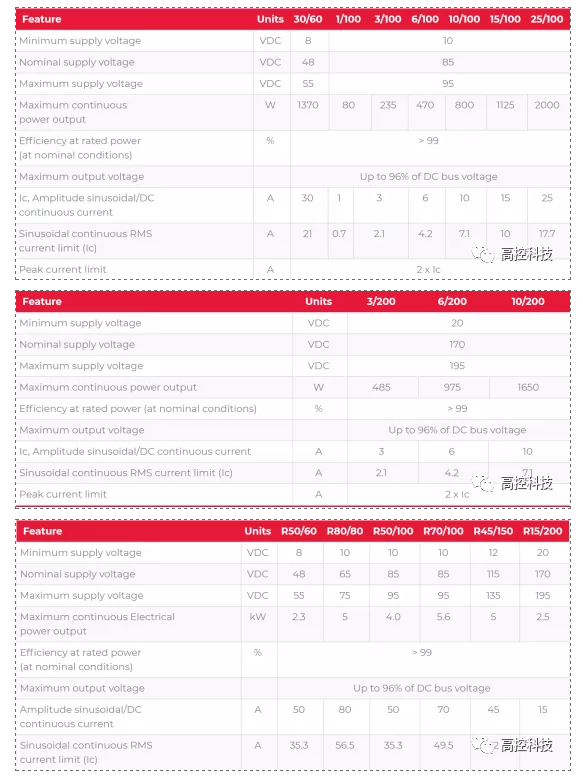
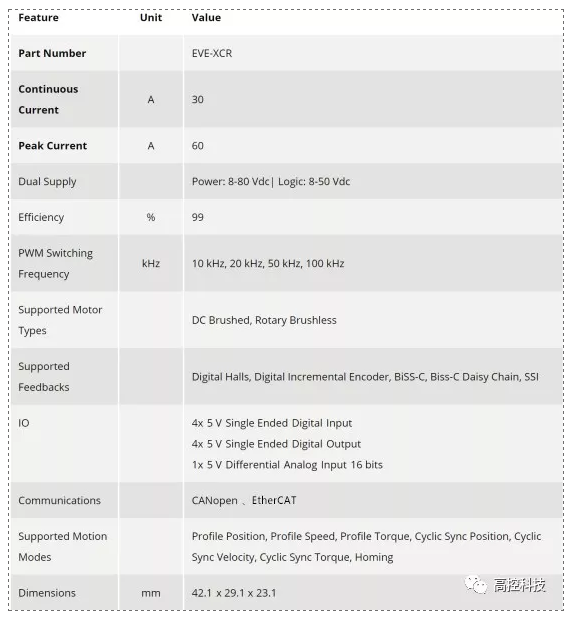
EVEREST XCR系列伺服驱动器
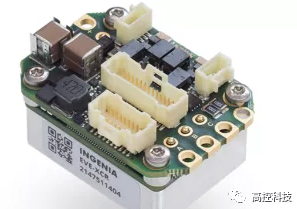
产品特点:
微型尺寸适用于机器人关节
双环路可提供无与伦比的精度
可接受16位高分辨率扭矩传感器信号
超快的伺服环可提供平稳的运行
易于使用
功能参数:
以上就是我们为大家推荐的几款适合于应用在协作机器人上的伺服驱动器,虽然近些年协作机器人的市场热度有所降温,但是行业规模依然保持着高速增长的态势,只是增速有所放缓。协作型机器人作为智能机器人的雏形,具有更广的应用面和更多的可能性,未来的市场前景可期。
近年来,相比成熟的国外市场,协作机器人在国内尚处于起步阶段,但发展速度十分迅猛。小型化、轻量型兼备安全性的协作机器人,其灵活高效的生产模式、用户友好的操作界面以及理想的投资回收周期,降低了企业自动化改造的门槛,使得越来越多的制造企业更愿意通过协作机器人来实现降本增效。协作机器人的发展趋势有以下几点:

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-22 14:16:40
- 2022-08-25 10:09:10
- 2022-09-12 18:10:44
- 2023-01-27 11:43:58
- 2022-08-04 19:23:47
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









