





遨博机器人报错代码:机器人运动输出和机器人未停止输出
时间:2020-11-16
阅读:5579

8.5.14 机器人运动输出
用户可通过此接口,当机械臂正常运动时,对外部输出机器人运动信号。
用户可参考如下示例,连接外部指示灯至机器人运动输出接口。请参见下图。
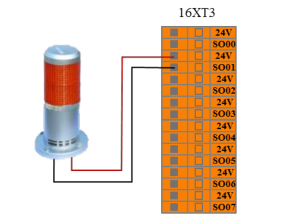
图 8-15 机器人运动输出连接示意图
8.5.15 机器人未停止输出
用户可通过此接口,当机械臂接收到停止信号并在减速过程,还未完全停止时,对外部输出机器人未停止信号。
用户可参考如下示例,连接外部指示灯至机器人运动输出接口。请参见下图。
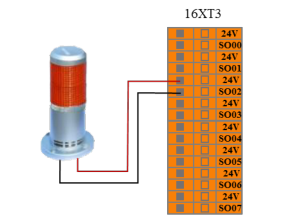
图 8-16 机器人未停止输出连接示意图
此配置下,当机械臂接收到停止信号并在减速过程,还未完全停止时,对外部输出机器人未停止信号,外部机器人未停止状态指示灯亮。
报错代码
遨博
遨博机器人
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-11-06 21:02:05
- 2022-11-08 15:34:38
- 2022-11-07 11:03:24
- 2022-11-06 17:03:18
- 2022-11-06 11:04:05
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









