





研究人员这样提高机器人视觉感测 适应非标环境

美国研究人员发现了人脑是如何对强光进行反应处理的,改善机器人的视觉感应适合人类协作的重要因素。
研究人员说,为了促进自主性的发展,机器感测必须在不断变化的环境中具有弹性。
美国陆军作战能力发展司令部陆军研究部研究员安德烈·哈里森说:“当我们开发机器视觉算法时,像手机摄像头一样,现实世界中的图像通常会被压缩到较窄的范围,就像手机摄像头一样。”“这可能会增加机器视觉算法的脆弱性,因为它们基于人工图像,这些图像与我们在现实世界中看到的模式完全不匹配。”
哈里森说,通过开发一种具有100,000比1的显示能力的新系统,该团队发现了大脑在更多实际条件下的计算能力,因此他们可以将生物适应力构建到传感器中。
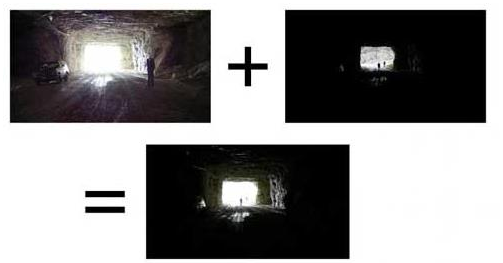
从洞穴开口的角度来看,高动态范围亮度的示例,其中室内和室外亮度的组合可能超过10,000到1的最大最小亮度比。右侧的场景是多次曝光后的混合图像,显示了人类在同一视图中透过巨大的亮度差异看到多个目标(三个制服和一辆汽车)的能力。图片:美国陆军)
当前的视觉算法基于对人和动物的研究,并使用计算机监视器,其亮度范围在约100比1(最亮像素与最暗像素之间的比率)的范围内。在现实世界中,这种变化可能是100,000比1的比率,这种情况称为高动态范围或HDR。
“光线的显着变化可能会挑战陆军系统,在森林冠层下飞行的无人机在风吹过树叶时可能会因反射率变化而混淆,或者在崎terrain地形上行驶的自动驾驶汽车可能无法识别坑洼或其他障碍,因为光照条件与训练视觉算法的算法略有不同。”陆军研究员周宝雄博士说。
研究小组试图了解大脑如何自动从现实世界中获取100,000比1的输入并将其压缩到更窄的范围,从而使人类能够解释形状。该团队研究了HDR下的早期视觉处理,研究了诸如HDR亮度和边缘之类的简单功能如何相互作用,以此来揭示潜在的大脑机制。
洪说:“大脑有30多个视觉区域,我们对这些区域如何将眼睛的图像处理成3D形状的知识仍然很初级。” “我们根据人类行为和头皮记录进行的HDR亮度研究的结果表明,我们对如何弥补实验室与现实环境之间的鸿沟真正了解其实甚少。但是,这些发现使我们脱离了常规,表明我们以前基于标准计算机监视器的假设对现实世界的概括能力有限,并且它们揭示了可以指导我们的建模朝正确机制发展的原则。”
该杂志视觉(“下的高动态范围(HDR)的亮度所调用便利的高对比度目标和亮度相似性分组突然变暗”)公布了团队的研究发现,突然下高动态范围变暗(HDR)的亮度所调用促进高对比目标并按亮度相似度进行分组。
研究人员表示,发现光和对比度边缘在大脑的视觉表示中如何相互作用的发现,将通过纠正从2D信息估计3D形状时不可避免的歧义,有助于提高在真实世界的亮度下重建真实3D世界的算法的有效性。
洪说:“经过数百万年的进化,我们的大脑已经进化出了从2D信息重建3D的有效捷径。” “这是一个有着数十年历史的问题,即使在AI的最新发展中,它也继续挑战着机器视视觉领域。”
除了实现自主愿景之外,这一发现还将有助于开发依赖于广泛动态范围的感应的其他支持AI的设备,例如雷达和远程语音理解。
研究人员将利用他们的研究结果与学术界的合作伙伴一起开发计算模型,特别是尖峰神经元,这些神经元可能对HDR计算和更节能的视觉处理均具有优势-这是低功率无人机的重要考虑因素。
洪说:“动态范围的问题不仅仅是感知问题。” “在大脑计算中,这也可能是一个更普遍的问题,因为单个神经元有成千上万的输入。您如何构建可在不同情况下侦听正确输入的算法和体系结构?我们希望通过解决这一问题,在感官层面,我们可以确认我们走在正确的轨道上,以便在构建更复杂的AI时可以使用正确的工具。”

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
红点背后的黑科技: Grace 7 Pro的工业设计革命
关键字: 天机 2024-06-28 -
零代码,零编程,5分钟配置,最快2小时投产 | 跨维智能发布3D视觉引导无序抓取套件
关键字: 跨维 2024-06-28 -
【新品发布】大模型加持,5分钟配置!跨维智能重磅推出工业物流纯视觉成像感知套件
关键字: 跨维 2024-06-27 -
E-Wireless:新一代无线示教套装亮相,精妙组合一套搞定!
关键字: 艾利特机器人 2024-06-26 -
伟景智能焊接专用3D相机,助力工业制造实现革命性突破!
关键字: 伟景 2024-06-25
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03


- 2021-01-05 15:49:07
- 2022-06-09 17:46:18
- 2021-03-09 11:18:10
- 2021-02-05 13:07:47
- 2019-12-19 17:58:28
- 2021-03-05 18:02:45
- 2022-10-10 07:16:03
- 2022-08-05 12:01:03
- 2022-08-30 14:45:07
- 2022-09-08 11:34:03
- 2022-08-12 08:20:38
- 2022-08-09 15:29:48
- 2024-06-28
- 2024-06-28
- 2024-06-27
- 2024-06-26
- 2024-06-25
- 2024-06-25
- 2024-06-21
- 2024-06-21
- 2024-06-20
- 2024-06-17









