





遨博机器人报错代码:移动命令和移动类型

11.5 移动命令( move )
Move(移动)命令用于机器人末端工具中心点在路点间的移动操作。通过基本路点(waypoint)控制机器人的运行,路点(waypoint)必须置于运动命令下。
➢ 在程序列表里新增一个 Move 节点,下面含有一个 Waypoint 节点。
➢ 点击昵称右侧输入框可修改命令名称。
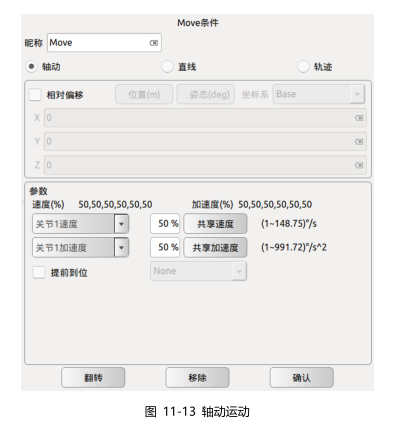
➢ 选中 Move 节点,可以对 Move 命令进行状态配置。
➢ 机械臂运动属性有三种选择:轴动运动、直线运动和轨迹运动。将在之后小结进行详细介绍。
➢ 点击移除可删除此 Move 命令。
➢ 必须点击确认,确认配置完成,并保存。
➢ 直线运动以及轨迹运动中的 arc 和 Movep 运动模式属于笛卡尔空间轨迹规划,
需要做逆运动学求解。因而可能存在无解、多解、逼近解的情况;而且由于关节空间和笛卡尔空间的非线性关系,可能会出现轴动运动超出其最大速度和加速度限制的情况。
11.5.1 移动类型
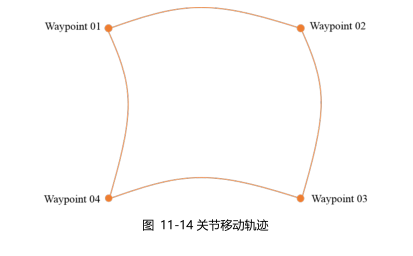
轴动运动
根据路点间的各个关节的运行角度,根据设定的电机的最大速度和最大加速度(六个机械臂的公共参数)限制,各个关节以最快的速度同步到达目标的路点(始末速度均为零)。运行过程中,可通过轨迹显示功能观察机械臂末端运行轨迹。如果希望机器人手臂在路点之间快速移动,而不用考虑 TCP 在这些路点之间的移动路径,此移动类型是个不错的选择。轴动运动适用于在空间足够的环境下,用最快的方式移动。运动方式如下图所示。
关节最大速度和加速度:
➢ 最大电机运动速度为 3000rpm,建议用户实际使用时最大不超过 2800rpm,最大电机运动加速度(即每秒增加的电机速度)为 20000rpm/s。
➢ 机器人关节速度为电机速度/转速比。AUBO-i5 的 Joint 1 ~ 3、4 ~ 6 的转速比分别为 121 和 101。
➢ 关节运行中可分别设置关节 1-关节 6 的关节最大角速度和最大角加速度百分比,点击共享按钮可将速度或加速度复制到其他关节处。

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-11-06 21:02:05
- 2022-11-08 15:34:38
- 2022-11-07 11:03:24
- 2022-11-06 17:03:18
- 2022-11-06 11:04:05
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









