





香港中文大学开发出“FreeBOT”球形机器人
时间:2021-03-26
阅读:8768

香港中文大学的研究团队开发了“FreeBOT”球形机器人,其大小比垒球略大,可以在平面上滚动并在墙壁和斜坡上攀爬。机器人彼此粘在一起,也可以彼此分开,并共同创造各种形状和动作。
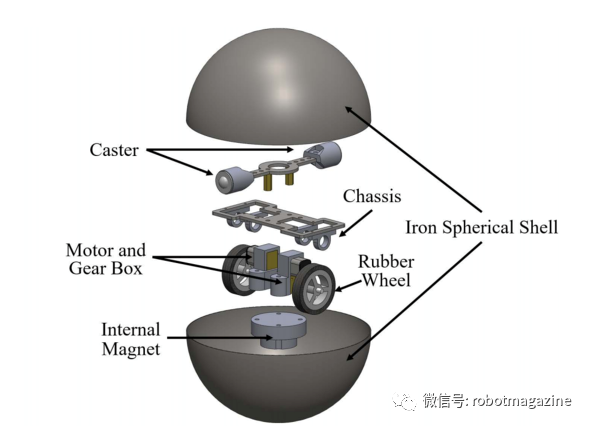
FreeBOT模块是一个内部装有磁铁的球形机器人,它由两部分组成:磁铁球形壳体和内部驱动机构。内部驱动机构有两个轮子,并由两个直流电动机通过齿轮驱动。内轮在球壳中的位置通过电机控制,并且独立在平面上滚动。强大的内部磁体允许在铁磁壁上垂直移动。
原型的内部结构
FreeBOT的分解图
FreeBOT内部磁铁很小,但是会产生很强的外部磁场。它集成了其他模块,以便被磁场吸引,甚至在集成后也沿模块移动。由于几乎整个模块都是接触点,集成机器人组可以各种形状移动。例如,两个机器人可以一起工作以攀登非铁磁纸板台阶,或攀登其他模块(例如梯子)。
机器人
球形

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
2025两会热议:工业机器人“黄金五年”已来?
关键字: 工业机器人 2025-03-12 -
AI赋能工业机器人,制造业革命,已悄然来临!
关键字: 工业机器人 2025-01-16 -
巅峰对决完美收官!2024年中关村仿生机器人大赛各项冠军出炉!
关键字: 仿生机器人 2024-11-29 -
出海+ | 极智嘉10月全球新动态
关键字: 极智嘉 2024-10-24 -
会议邀请 | 昇视唯盛邀请您参加第8届国际机器人焊接、智能化与自动化会议暨第15届中国机器人焊接会议
关键字: 昇视唯盛 机器人焊接 会议 2024-10-17
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2020-01-07 18:10:40
- 2021-03-26 09:48:02
- 2016-09-13 00:00:00
- 2017-04-26 00:00:00
- 2022-08-08 15:45:31
- 2023-06-14 10:12:48
- 2022-08-24 12:09:31
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
栏目推荐
- 2025-03-12
- 2025-01-16
- 2024-11-29
- 2024-10-24
- 2024-10-17
- 2024-10-16
- 2024-10-16
- 2024-10-16
- 2024-10-15
- 2024-10-15









