





移动式焊接机器人的发展状况与应用实例 上篇
时间:2017-05-19
阅读:10477
原创

北京石油化工学院针对“鸟巢”建设施工中存在多处横焊、立焊以及仰焊工作成功研制 GDC-1 型柔性轨道式焊接机器人,成功应用在焊接现场。其采用刚性和柔性轨道相结合的方式,可完成大型钢结构焊接现场形状复杂的焊接工件,适应性强,可高效率的完成平、横、立、仰等位置的自动焊接工作。
机器人.jpg)
机器人.jpg)
焊接机器人.jpg)
如图 1.7(a) 、(b)所示机器人沿柔性轨道可完成内外圆管自动化焊接,如图 1.7(c)所示为通过大量现场焊接实验,为更好的适应现场的RHC-3 型焊接机器人,进一步推动了复杂钢结构件焊接自动化。其在自动化焊接前需轨迹示教,需记录机器人在焊接过程中各点以及焊接终点位置坐标,在系统中进行线性化处理,并拟合出焊接机器人焊缝跟踪运动轨迹。拟合完成后焊接机器人将按照拟合曲线,完成复杂焊缝的自动化焊接工作。其优点是可适应复杂焊缝的焊接环境,但其示教过程较为复杂,跟踪精度略低。
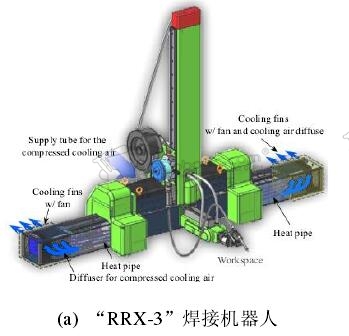

韩国首尔大学针对船舶焊接中双壳体形焊缝研制名为“RRX-3”移动焊接机器人,如图 1.8(a),该机器人包括十字移动平台和“ 3P3R”小型焊接机械手,移动平台可带动机械手完成横向和纵向运动,该机器人自由度较多,可完成船舱内绝大部分焊接工作。随后Namkug Ku和Ju-hwan 等人根据焊接现场环境以及焊接适应性对机器人进行了改进,如图 1.8(b),改进后的“RRX-3”移动焊接机器人移动平台下部分移动机构由原本单侧伸出改为双向伸出,增大了工作范围,机器人自身尺寸和重量均由大幅度缩小以适应船舶焊接现场,设计了无线遥控进行在线编程,便于人工操作且可实现一人多机同时操作。但该机器人系统仍过于庞大,质量重,无法在封闭结构中进行焊接。
焊接机器人
直角转弯移动焊接机器人结构设计与仿真
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









