





焊接机器人的视觉系统标定方法研究基于张氏标定方法的改进

焊接机器人的视觉系统标定方法研究基于张氏标定方法的改进,根据3.2.3的张氏标定的实施,我们可以发现在这个标定过程中选取角点这一部分首先需要人工点选范围,然后自动获取角点。但是张氏标定法中提取角点有以下几个缺陷:(1)当平面标定模板不是很平整的时候,凹凸点的存在会使角点检测结果出现偏差(2)当采集的源图为非完整的棋盘格时可能会有提取不到角点的风险。因此当角点提取不准确的时候,会导致标定的内外参数出现精度偏差,导致系统累积误差变大,影响结果。因此可以从角点提取环节来进行张氏标定的优化。
角点提取方法现在常用的一般有Harris角点提取算法、SIFT角点提取算法、Surf角点提取算法和Fast角点提取算法。其中Harris算子对尺度变化比较敏感,往往尺度不一致会导致在不同尺度的图像中检测出来的角点数量不一致。而SIFT算子和Surf算子虽然效率稍有改进但是重复率和精确度上不如Harris和Fast算子。而Fast是基于灰度的角点提取,本项目中采用的标定板黑白方格区域变化分明,灰度在边缘处跳变比较明显,并且Fast算子由于提取过程中不需要使用函数偏导,所以角度提取速度较之其余三者速度会快很多,非常适合实时性要求较高的角点提取,所以采用Fast算子来进行角点的提取,可能效果会比较好,下面做出验证。
Fast角点检测是由Edward Rosten和Tom Drummond于2006年提出的,该算法将被检测的角点定义为像素点周围邻域内有足够多的像素点与该点处于不同的灰度区域[41]。通常考虑图像中任意的一个像素点和以它为中心的区域内像素进行对比。如图3-11给出的示意图,其中右图白色方格组成的区域为一个半径为3像素的Bresenham离散圆。
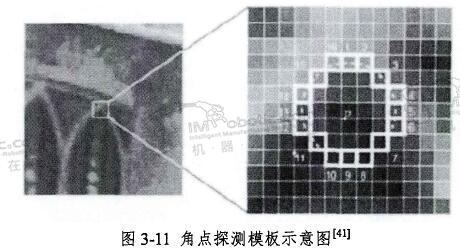
下面可以通过式(3.13)来判断该像素点是否为角点:

上式中:l(x)为圆周上像素点的灰度值,l(p)为圆周中心像素点的灰度值,![]() 为根据实际情况所定义的阂值。通常当阂值确定后,以圆周中心点为基点,利用该模板遍历全图,找到满足式(3.13)的像素点,则这些像素点的集合就是角点集。
为根据实际情况所定义的阂值。通常当阂值确定后,以圆周中心点为基点,利用该模板遍历全图,找到满足式(3.13)的像素点,则这些像素点的集合就是角点集。
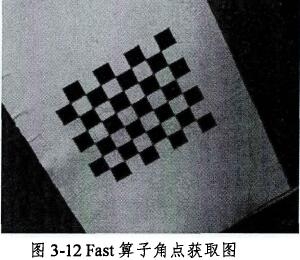
则按上述方法,如果用到本项目标定环节选取角点中,下面参照算法利用MATLAH编程,并将拍摄标定模板经该程序处理,可得下图3-12,相较于张氏标定法中提取角点过程中的角点图3-8,由肉眼并不能发现明显的不同,因为两方法相对而言寻找角点的精度都是可以达到使用的标准,所以,若要比较两种提取角点方法的好坏继而比较基于Fast提取角点的改进张氏标定法是否具有比原张氏标定法更具有优越性,则应该将提取的角点数据提取带入到标定工具包内,从标定结果的误差分析中来获取我们想要的结果。
下面依次将各源图经过Fast算子提取角点后,替换到标定工具包内,可得如下的标定结果:
![]()
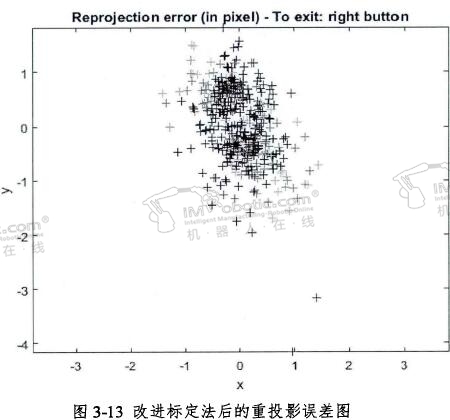
相比较标定工具包的标定算法得出的pixel error里的[0.53 0.79],该标定方法改进后得出的pixel error矩阵内的两个参数都相应的减少,而像素误差值的减少也标示着标定精度的提升。下图3-13为基于标定方式改变后的重投影误差图,与图3-9的重投影误差图相互比较可得出图3-13中在x轴由[-1,1]和Y轴[-1,1]之间组成的矩形区块内,点更为集中,尤其是x轴大于1和Y轴小于-1这个范围里,图3-13中的十字点的数量远小于图3-9中的数量。
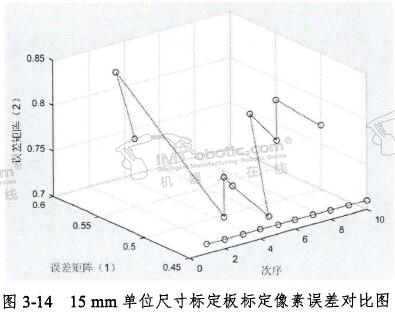
又因为用张氏标定工具箱需要手动点选特征点取值范围,所以标定结果存在一定的波动性,一次偶然的结果对比不具有通用性,所以下面用同一个相机对单位尺寸为15mm和10mm棋盘标定板分别进行10次标定,将每次标定后的pixel error提取出来,分别与经过Fast算子提取角点的改进张氏标定工具包的标定结果进行对比,因为后者标定过程中无需手动点选范围,所以每次标定结果相同,所以后者只需要标定一次即可。
则当单位尺寸为15 mm时,其10次比较结果为图3-14所示:
则当单位尺寸为10 mm时,其10次比较结果为图3-15所示:
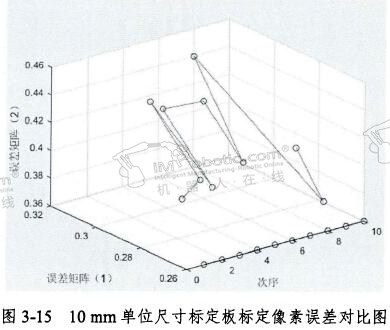
以上两幅图3-14, 3-15中,蓝色线为改进后的张氏标定法像素误差值,橙色线为张氏标定法像素误差值,两幅图中橙色线的值几乎都大于蓝色线上的值,所以可以得出该结论:利用Fast算子提取角点后的改进张氏标定法比原来的张氏标定法准确度更高,并且由于Fast算子的特性,不涉及到函数的导数,所以提取角点的速度也优于后者,在角点数目较少时这点时间可以忽略不计,当角点数超过一定数量时,则前者的效率会得到明显提升。
焊接机器人的视觉系统标定方法研究基于张氏标定方法的改进
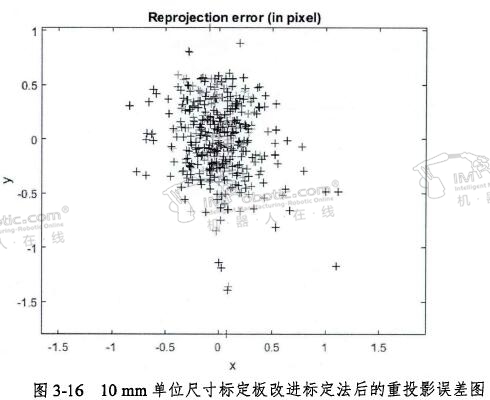
同时通过图3-14和图3-15的对比来看,当标定模板的棋盘图的单位尺寸为10mm时,相较于15mm时像素误差几乎只有前者的一半,并且图3-16所示,10mm时的改进张氏标定法的重投影误差图的十字点除了可数的十几个以外,几乎全部落入在x轴由[-1,1]和Y轴[-1,1]之间组成的矩形区块内。综上所述在该项目所处的工作环境下,当标定模板的单位尺寸选为10mm时较之于15mm,在精度上也有极大的提升。

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









