





焊接机器人焊缝特征提取和模式识别 下

ROI是感兴趣区域,通过对图像的ROI提取,可以得到想要处理的图像特征区域,并减少对图像其他无关区域的处理。由于减小了数据量同时该数据量中可以包含其他会对所提取特征产生干扰的元素,所以可以减少处理时间和增加精度。本项目中根据之前两个问题的提出,可以使用ROI提取来减少图像处理区域。焊接机器人下面对ROI区域选择进行论证。首先对全部源图进行上述的图像去噪和二值化,接着根据焊缝种类和采集相机将图像分为6类,接着估算各个激光线条与焊缝交点在图像中的位置。
通过对采集到的图片进行观察,在如上位姿分布下的双目视觉系统中,无论是何种焊缝也无论是左眼相机或右眼相机,线激光与焊缝交点处在一个波动集中的范围内,用估算法来估算该交点。相机的像素是1024X768,图片在PC中的长宽分别为283 mm,210 mm。从焊缝图片中找到交点,用尺子测量图片中交点的位置,分别是L、W,交点所在的像素坐标(i,j)可以下式(4.1) , (4.2 )得出:
.jpg)
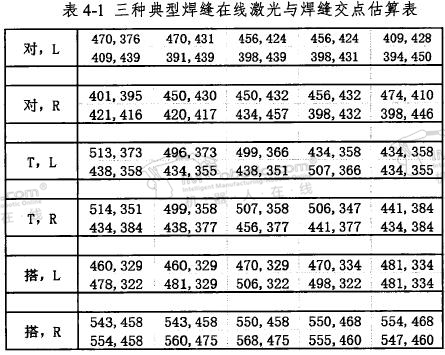
将上表中各个坐标数据导入到MATLAB中察交点坐标集中的范围,之后可以得到结果如图画出平面坐标散点图,通过散点图观4-9所示:
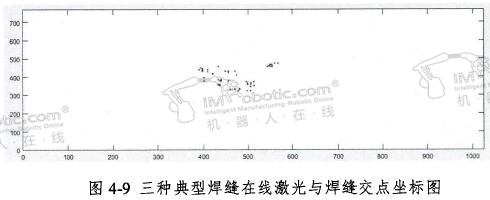
无论是左眼相机还是右眼相机,由于位置的不同,焊缝与线激光的交点可能会不同,但因为两相机拍的是同一时刻同一物体,同时两相机的光轴角度和光心距离处于一个较小的范围,所以两相机的成像传感器上的相片特征大体是类似的。图4-8中可以发现,对交点提取产生影响的为对接焊缝的右边两条不平行直线产生的交点,搭接焊缝左边两条不平行直线产生的交点和T形角焊缝的右边直线。通过本小节上述对不同焊缝不同相机下交点的位置估算,交点位置处于一个横向像素[380,580],纵向像素[300,500]的范围内,而对交点产生的干扰因素多位于横向像素小于290和大于890的范围内,因此可以提取出一个基于交点的ROI,来去除对交点提取产生影响的因素。
基于上述分析,可以选出一个ROI,横向像素范围为[330,750],纵向像素范围为[220,640]。同时若一个特征点在ROI图像中像素坐标为(u,v),可以通过式(4.3)(4.4)将该作为还原到相机采集源图的像素坐标((i, j)中:
.jpg)
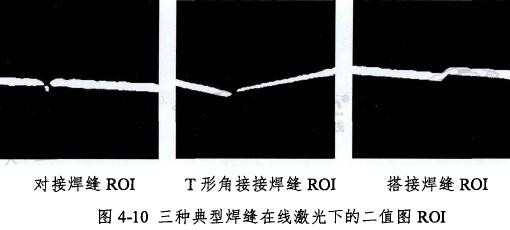
焊接机器人图4-10为图4-8经过ROI提取后的效果图,图中待处理图样和背景区分明显、同时干扰因素少且三种焊缝图样对比鲜明,是很好的用作后续模式分类和特征点提取的源图。通过4.1.1, 4.1.2, 4.1.3所采用的图像处理方法,将双目视觉系统采集到的所有图像都做相同的处理,可以得到120幅处理后的图样。

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









