





焊接机器人焊缝特征提取和模式识别中焊缝图像模式识别 上

焊接机器人在实际焊接过程中,焊接机械手需要对焊接时的焊缝类型进行判断,图像处理设备可以经由实时采集到的通过章节4.1过程处理后的图片,选取适应的特征来分辨出该焊缝属于对接、搭接还是T形角焊接,对于不同类型的焊缝采用不同的焊缝点提取方法以及不同的焊炬姿势。利用模式识别方法可以达成分辨图像的要求,对三种焊缝进行分析得到特征值,通过分类模型对这些特征值进行聚类,从而利用聚类结果识别焊缝种类。
焊缝图像待识别特征提取
模式识别是基于特征的分类,从不同类别的焊缝图像中抽取出每个类别相应的特征向量叫做特征提取,PC通过对图像的特征提取进而对提取元素进行分析并将该特征归属于具体类别的图像是进行图像模式识别的目的,好的特征具有区分性强、组成元素少、独立性高、获取可靠这四个特点。图像特征分类根据不同的应用场景有不同的标准,此处将图像特征划分为颜色、纹理、形状和空间关系。
图像的颜色特征有颜色直方图、颜色矩、颜色聚合向量、颜色相关图。颜色直方图是将图像以像素为基本单位,提取出组成图像的每个像素上各颜色分量的灰度值以灰度值和频数作为统计直方图的横纵轴表示出来。颜色矩是基于颜色信息绝大部分分布于数字图像的低阶矩中,将数字图像上每个像素基于颜色分解为Y, U, V,求取各个颜色空间下的灰度的一阶矩、二阶矩、三阶矩组成九维向量空间。颜色聚合向量是在颜色矩的基础上加上连通域来分辨该像素是否处于聚合或者非聚合,分别列出聚合像素组合的颜色矩和非聚合像素组合的颇色矩。颜色相关图也是一种墓于颜色直方图的改进特征,由Cornell University的Huang J提出来的一种不仅包括颜色统计信息同时包括颜色障距离变化的空间信息一种特征关系。对本项目而言,若采取颜色特征来分辨三种典型焊缝的二值图,由于二值图颜色较为单一且白色特征在黑色背景下占比类似,所以很难鲜明的分选出鲜明结果。
图像的纹理特征用来表述物体表面灰度变化,若要同过纹理来区分不同的图像,则纹理的选择应该是基于某种规律的体现,在图像组的相同类别图像中有同质化的因素。由于纹理本身定义的非清晰性,所以对纹理没有明确的规范,但是对纹理特征的提取方法确有了指导性的划分:结构方法、信号处理方法、几何方法、模型方法和统计方法。在实际应用中最广泛使用的是基于统计方法的提取图像的灰度共生矩阵,其算法可以简述为:P1(i,j)为图像中一个任意像素点,另一点为P2(i+△i,j+△j),他们的像素灰度分别为m,n,则此点对(P1,P2)的像素对为(m,n)。通过点P1的移动,P2位置也相应更改从而得到不同的像素对的值,通过统计该像素对出现的频数就可以得到灰度联合概率密度,又称灰度共生矩阵,通过灰度共生矩阵,还可以进行数学推理转换,得到角二阶矩、逆差矩等其余纹理特征值。针对上述算法,利用MATLAB求解图4-10中三幅图像的灰度共生矩可得如下结果:
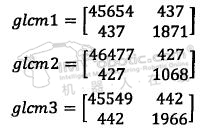
焊接机器人glml为对接焊缝二值图ROI的灰度共生矩阵、glm2为T形角接焊缝二值图ROI的灰度共生矩阵、glcm3为搭接焊缝二值图ROI的灰度共生矩阵,从上述三个矩阵中,我们可以发现(1)特征元素数量为4个,且其中两个元素值相同,因此独立特征元素数量为3个;(2)三种焊缝图的矩阵元素中左上和斜对角线的区分度低且右下元素对接和角接焊缝像素。因此利用灰度共生矩阵也很难满足本项目对三种焊缝的区分要求。

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









