





搬运机器人之视觉引导系统数学模型建立
时间:2017-10-13
阅读:8476


第3章视觉引导系统数学模型建立
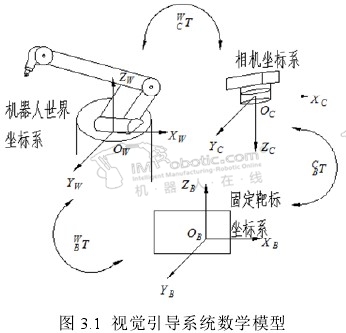
为了实现搬运机器人对进入相机视场中工件的抓取,需要知道相机坐标系和机器人世界坐标系之间的转换关系,从而可以实现相机对机器人的引导功能。由于本文研究的是工件的2D平面信息,且工件时刻处于水平移动状态,故而以水平放置在传送带上的固定靶标所处的平面来代替工件平面,也即是以固定靶标坐标系代替工件坐标系。同时也通过固定靶标坐标系作为中间转换环节,可分别求出机器人世界坐标系与固定靶标坐标系的转换矩阵WBT、相机坐标系和固定靶标坐标系之间的转换矩阵关系CBT、最终求出机器人世界坐标系和相机坐标系之间的转换矩阵WCT, 其数学模型如图3.1所示。
3.1相机坐标系和固定靶标坐标系的转换矩阵
为实现对机器人系统的标定,第一步需要求出固定靶标坐标系和相机坐标系之间的转换关系。在求固定靶标坐标系和相机坐标系之间的转换关系之前,需要对CCD相机的内部参数进行标定。
3.1.1小孔模型
小孔模型,指的是相机能拍摄到的所有景物通过相机的光轴中心点倒立显示在相机成像平面上的模型相机的光心,指的是以相机的光轴为相机坐标系通常我们把这根轴称作相机的光心。如图3.2所示,Oc代表的是相机中光
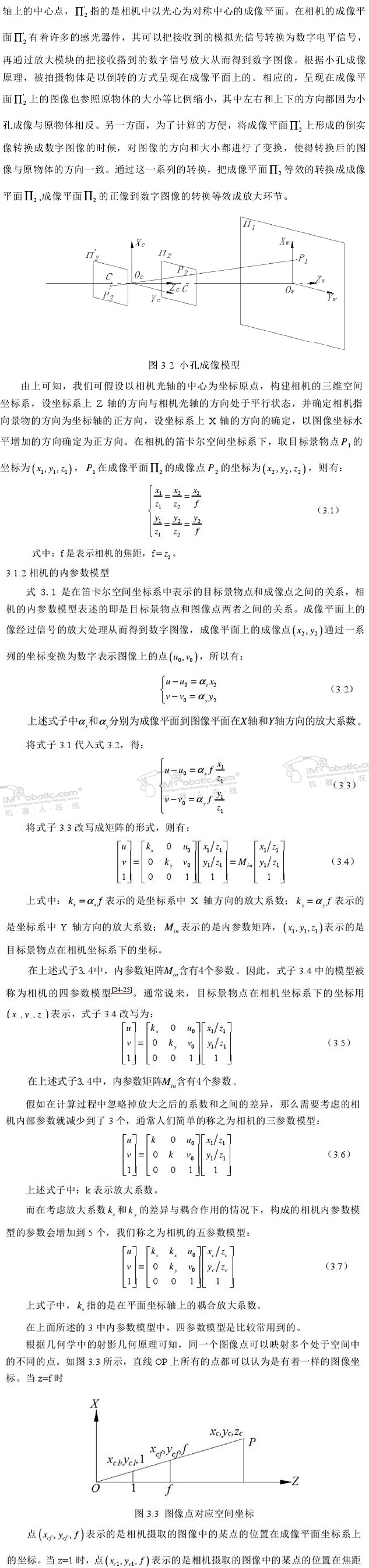
被完成归一化后,表现在成像平面坐标系上的点。根据求出的相机的各个内部参数,能够得出相机摄取的图像中的任一点的位置在焦距归一化成像平面坐标系上的坐标表示:

综上所述,可根据己知的成像平面坐标系上的点和光心,能够求出任意目标点所处的空间位置。 搬运机器人

搬运机器人,基于视觉引导的搬运机器人多目标识别及抓取姿态研究
技术干货

好的文章,需要您的鼓励
18

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-18 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-18
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









