





薄壁筒焊接的机器人离线编程
时间:2017-10-25
阅读:6966


薄壁筒焊接的机器人离线编程
焊接机器人在实际生产领域中扮演着越来越重要的角色,近些年来对焊接机器人的研究也更加深入,取得了飞跃式的进展。由于焊接机器人具备减轻工人劳动强度、保障工人安全、工作质量高、效率高、降低生产成本等众多优势,己经越来越多的应用到制造业生产当中,渐渐地发展成为不可过缺的生产设备。在实际制造业生产领域中通常更多的是采用上文述及的在线手动示教的编程方式控制机器人完成焊接的操作。随着焊接机器人编程技术的不断深入发展,以及生产中的要求不断提高,传统的在线手动示教的焊接机器人编程方式存在的一些弊端会被放大,会对实际生产产生一些限制性的负面效果,例如传统的手动示教编程方式的效率较低,生产的精度不够高导致生产质量较低等使发展遇到了瓶颈。为了克服传统焊接机器人手动示教编程方式存在的一些弊端,离线编程方式应运而生,并且近些年来受到了更多的重视,研究更加深入与广泛。
在进行离线编程之前需要借助三维软件对工件进行建模fs51,本次实验采用solidworks软件进行工件建模。
基于SolidWorks建立薄壁筒模型
为了能够得到一套具有功能强大并且具有强大生产力的实体建模软件,PTV公司与CV公司的技术副总裁于1993年共同发起创办了solidworks公司。两年之后solidworks软件得以推出而问世。solidworks软件一经问世凭借着出色的强大性能与优异的创新性得到了社会各界的高度评价占据了很大的市场份额。
Solidworks软件作为三维CAD实体建模系统,是依托于windows系统平台开发的,这也是全世界范围内第一个依托于windows系统平台开发的三维CAD实体建模系统。极富创新性的Solidworks软件也很大程度上契合了时代发展的潮流,因而在问世后的短短几年中就得到了广泛的应用,Solidworks公司也得到了丰厚的利润,一举发展成为同类软件的标杆。
Solidworks软件之所以能够得到广泛的认同是因为它的便捷性,能够使操作者们更方便的操作,节省了大量的时间,提高了工作的效率。首先Solidworks软件的用户界面更加友好,采用了动态界面的方式以及功能强大的导航栏,能够使整个设计过程清晰、便捷,避免了一些繁杂的设计步骤,并且清晰的设计过程也便于设计工程师们及时发现设计中存在的不足之处,能够及时进行修改。
Solidworks软件能够直接生成三维立体模型,设计者可以从不同角度对模型进行平移、翻转等操作,直观性强。并且也体现了Solidworks软件的创新性,以前的建模软件只能生成二维模型,然后将二维模型转换成三维模型,这样在一定程度上会消耗更多的时间,降低了工作的效率。Solidworks软件操作更加便捷,并且直观易学。
除此以外Solidworks软件还拥有了一个强大的标准件的图库,图库中包含的内容十分丰富,用户还可以根据自己的需要自定义添加模型补充到图库中去。这样设计师们在设计师们在设计的过程中根据自己的需要直接从图库中调取所需要的模型,不需要重新设计,避免了重复性的设计工作。
Solidworks软件三维建模后生成的三维实体模型的各组成部分的信息具有很强的关联性,各个零部件的实体模型与装配体的实体模型的信息具有关联性。由此可以实现对整体三维实体模型的快速修改,当需要对某一部件进行修改时三维模型整体都会随之实时更新完成修改,避免了要逐个修改的问题,更加智能化、人性化,提高了设计效率。
首先在solidworks软件中建立薄壁筒三维实体模型,见图3.3。
之后将其保存为.stl格式,将生成模型文件导入到机器人离线编程软件中。由此我们己完成三维模型导入工作。
工作站建立
为了达到与实际工作环境一致的目的,使其模拟的更加充分,首先就要在虚拟环境中建立一个焊接机器人工作站。在工作站中分别对焊接机器人本体、工具、工件进行建模,可以最大程度上地模拟真实的焊接环境。其中焊接机器人本体与工具的模型是软件中自带的无需单独建立,根据自己的实际需要选择相应的焊接机器人型号以及在模型库当中选取相应的工具,提高了工作效率,只需要针对所焊工件的不同结构单独建模即可。
焊接轨迹路径生成
出于模拟实际工作的真实情况,首先在三维软件中制作并且生成出与实际工件相同形状相同尺寸的模型加载到机器人离线编程软件中,同时也需要把模拟环境中焊接机器人的焊接路径生成出来,作为一种指令传输给焊接机器人口。
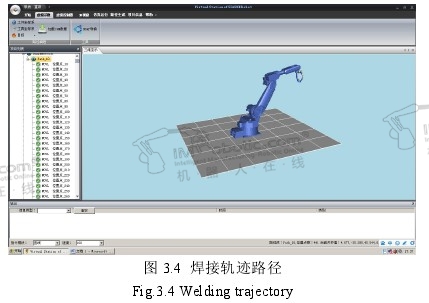
首先将导入到软件中的三维工件图形视图进行调整,力图将要生成轨迹的部分清晰、直观地展现在眼前,便于提取轨迹并且能够提高效率。再将模型调整到一个合适的视角后,采用“边界加工”的方式输入采样的精度,一切设定结束之后在预定的焊接轨迹上进行选点工作,选点的原则在于尽可能多、均匀地在预定轨迹上选点,因为数量多、分布均匀的点更能近似、准确地描述出整段路径使其更加精确,见图3.4。选取目标点之后将生成的轨迹输出到自己设定的路径内,路径保存文件为txt格式,内容为路径中各点的位置坐标值以及目标点的姿态值。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









