





马鞍型焊缝专用焊接机器人工作域确定方法
时间:2017-11-01
阅读:9300


马鞍型焊缝专用焊接机器人工作域确定方法
1.机器人设计依据
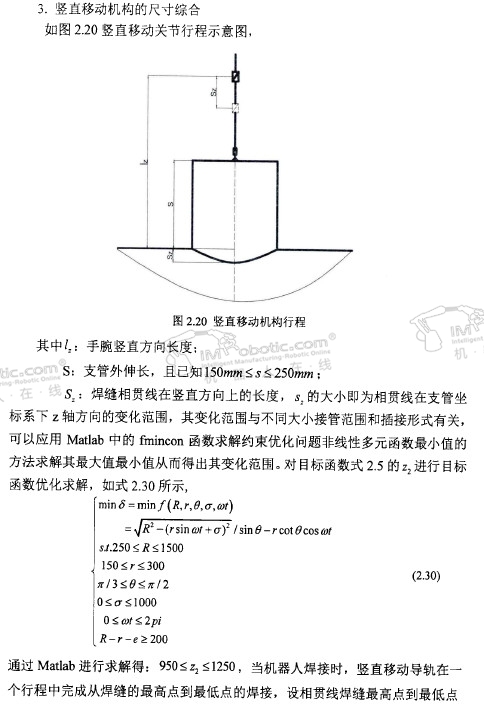
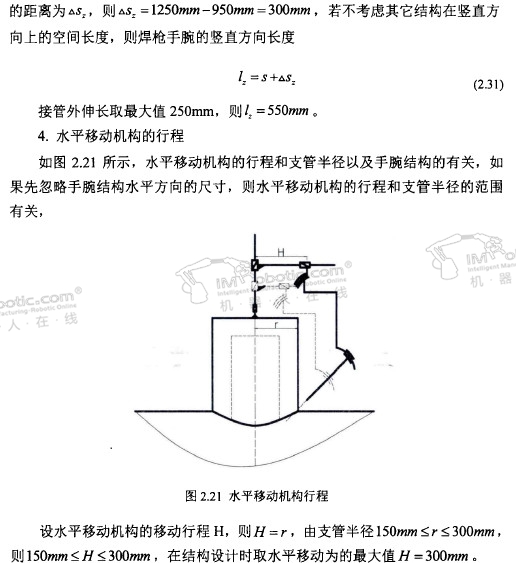
本课题研究的马鞍型焊缝焊接焊接机器人应用于某化工厂的压力容器筒体和法兰管插接形成的马鞍型焊缝的焊接。厂商给定的参数为:筒体和法兰管的材料为碳钢及不锈钢,大管直径500mm~3000mm,小管300mm~600mm,管厚8mm(5mm)~30mm。根据HGT20583钢制化工容器结构设计规定对法兰管接管外伸长的规定查的接管外伸长为150mm~250mm。
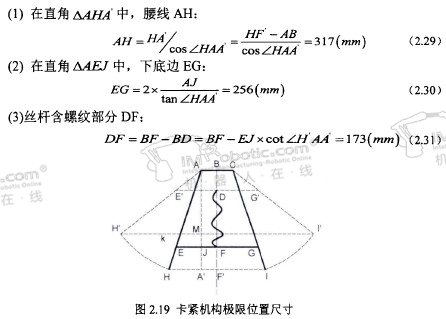
2.卡紧机构尺寸综合
根据设计要求支管的管径范围为300mm~600mm,接管的外伸长为150mm~250mm,对铰链机构适应不同管径和长度的情况进行计算,如图2.19所示:实线位置为卡紧机构在管径300mm的位置,虚线位置为卡紧机构在管径600mm的位置。设定卡紧机构上底边AC=100mm, ∠HAA’=190,丝杆轴长BF=235mm,利用几何关系:
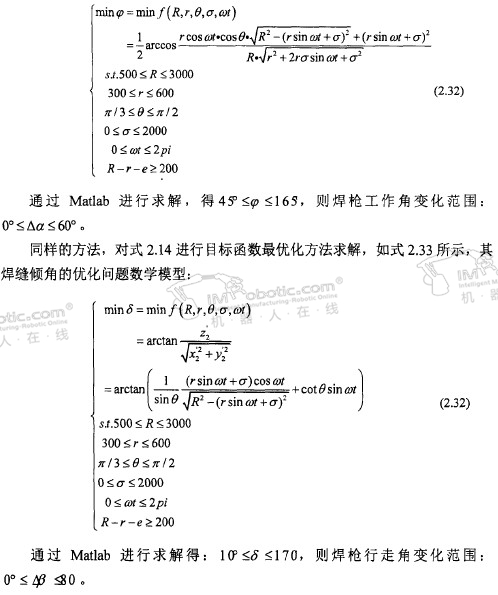
5.焊枪工作角和行走角变化范围
在设计机械手腕之前必须知道手腕的工作角和行走角的调整范围,焊接过程中焊枪轴线过球面和柱面切平面的二面角平分线的位置焊接效果最好,结合焊缝转角的定义,可以得到焊枪工作角的变化范围等于焊缝转角变化范围的一半,相同的焊枪行走角的变化范围等于焊缝倾角的一半。在不同管径大小的主管和支管以及不同插接类型的主管和支管之间的插接情况下,焊缝倾角和焊缝转角的变化具有一定的变化范围,在数学中求某个参数的变化范围可以通过求其最大值最小值得出,而求最大值最小值可以转化为数学中的最优化问题求解。
对式2.10进行目标函数最优化方法求解,如式2.32所示,其焊缝转角的优化问题数学模型:
通过分析管管相贯马鞍型焊缝的焊接特点,建立马鞍型焊缝的数学方程,通过对焊缝位置和焊缝姿态的相关定义,从相贯线的数学方程出发,得出相贯线焊缝的位置和姿态的特征矩阵,为焊接机器人的结构设计和控制系统的设计提供理论依据;分析马鞍型焊缝先关方程的特点,提出能够实现马鞍型焊缝焊接的可行方案,对各个方案进行对比确定最终的5自由度串联焊接机器人机构方案;通过设计依据和压力容器相关规范,得到焊接机器人移动范围,确定机器人对应关节活动范围及尺寸。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









