





激光双目视觉系统更适合焊接机器人焊缝检测
时间:2017-11-03
阅读:12128


激光双目视觉系统更适合焊接机器人焊缝检测
1视觉传感应用研究现状
视觉一直以来都是人类获取外界信息的强有力手段,视觉传感不单是对光信号的感受,还包括对视觉信号的获取、传输、处理和理解过程。机器视觉模拟人眼视觉功能对周围环境进行感知,利用视觉传感设备,结合图像处理、立体视觉的一些研究方法,借助计算机及其他仪器设备,确定三维景物的深度信息。
作为计算机视觉的一个重要分支,因其广阔的工业应用前景倍受各个国家的科学家重视,已有许多引人瞩目的研究成果。
三维物体的距离感知是计算机视觉的主要研究任务。
目前,获取距离信息的方法和技术很多。根据测量原理的不同,三维测量的方法可以分为光学测量、超声波测量以及电磁测量等。光学测量按照其测量过程所采用的照明方式不同,又可以分为主动测量和被动测量。主动测量需要专门的光源装置照明目标物体,根据被照物体表面反射特性获取目标的三维信息。
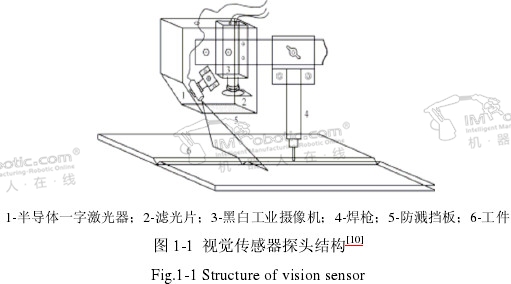
具有代表性的主动测距方法有结构光法、三角测量法等,比如常用的激光扫描式的视觉系统就是基于三角测量原理。被动视觉则不需要附加光源,利用场景在自然光照下的二维图像来重建物体的三维信息。文献设计了一种如图1-1所示的基于激光结构光的焊缝跟踪视觉传感器,该传感器能识别焊缝激光图像、自动输出焊缝信息并控制焊接机器人进行焊缝跟踪。该视觉传感器具有不同的焊缝图像模块,处理不同接口焊缝类型,计算出焊缝的位置坐标。
2激光结构光在视觉测量中的应用
激光结构光由于波长单一,抗电磁干扰能力强,检测精度高等优点,广泛应用于焊缝的检测与跟踪。作
为主动视觉测量技术,其工作原理是:
将激光发射器产生的激光投射到物体表面,CCD传感器接收与光轴成一定角度的经由物体表面形状形成的反射光,通过三角测量原理,可以得到物体表面的三维坐标。
如德国Scout公司开发的一种多条纹激光传感器,能同时实现焊接高度的对中跟踪以及姿态控制;加拿大的赛融公司(Servo-Robot)专注于焊接领域激光视觉系统研发,生产的多功能激光传感器系统,把焊缝定位、焊缝跟踪、焊接装备检测以及自适应焊接参数控制集于一体,能够实现高速的焊缝跟踪,是结构光传感器先进水平的代表。基于结构光双目立体视觉的路径规划原理是:将激光双目视觉传感器安装在机器人的末端,逐点测量焊缝中心坐标,建立焊缝轨迹的数据库作为焊接路径。
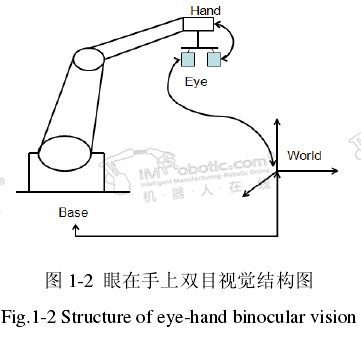
如图1-2所示,眼在手上的结构光双目立体视觉测量系统由安装在机器人末端的激光器、两台CCD摄像机构成测量系统。激光器发出的光束在焊缝中形成条纹。两台摄像机同步采集该条纹,结合摄像机标定参数对激光条纹的特征点进行处理获得三维空间坐标。张广军、贺俊吉等人提出基于神经网络的结构光立体视觉测量模型,该模型应用神经网络的泛化能力,消除了视觉模型误差、光学误差因素对测量系统的测量精度影响。王国荣、肖心远等人基于激光结构光视觉系统获取焊缝图像,在二维的曲线焊缝跟踪中获得良好效果。徐德等人对基于位置的机器人视觉伺服控制进行了研究,将结构光视觉系统配置在机器人末端执行器上,构成手眼系统,实现了机器人位置姿态和图像采集的同步,完成焊缝的自动识别和实时焊缝跟踪

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









