





焊接机器人焊缝检测与跟踪发展现状
时间:2017-11-03
阅读:9903

焊接机器人焊缝检测与跟踪发展现状
1 焊缝检测视觉传感的研究现状
近年来,应用视觉检测技术进行焊缝外形尺寸的检测及跟踪的应用研究得到快速发展。国内,孙大为等人提出了一种基于编码结构光的角焊缝外形尺寸检测方法,采用安装在机器人手臂末端的投影结构光视觉传感机构对焊缝进行测量。投影仪在测量位置向焊缝投射一幅伪随机编码彩色条纹图像与一幅用于彩色补偿的空白图像,利用补偿后的变形条纹图像恢复出焊缝表面三维数据,实现焊缝尺寸的可靠检测。大连大学甄恒洲开发了激光视觉传感器,将视觉传感器与五轴联动的激光焊接机床焊接头固定在一起,利用三角形测量原理,对线激光器在拼接曲面上的激光条纹形成的截交线进行三维数据实时测量,获取复杂拼接焊缝轨迹的形貌信息。高向东等人提出了一种基于卡尔曼滤波技术的焊缝检测方法,应用视觉传感器获取弧焊区熔池图像,并抽取图像质心作为描述焊缝位置的特征矢量,建立图像质心状态方程和测量方程,并应用卡尔曼滤波对图像质心位置和质心位移进行状态估计,实现弧焊过程中焊缝位置的精确检测。哈工大的伏喜斌等人基于激光视觉传感进行角焊缝外形尺寸检测,利用三角形测量原理,采集反映焊缝几何形状特征的激光条纹图像,通过中值滤波、二值化、中心线提取以及特征识别等图像处理算法,获得角焊缝的外形尺寸信息。国外,Sung等人设计了一种多激光条纹的视觉传感器(MLUS进行高速焊接场合的焊缝外形尺寸检测,该视觉系统应用单线激光三角测量原理,对单个图像中的_5条激光条纹同时进行处理以获取多个范围的焊缝尺寸信息
2 波纹板焊缝跟踪的研究现状
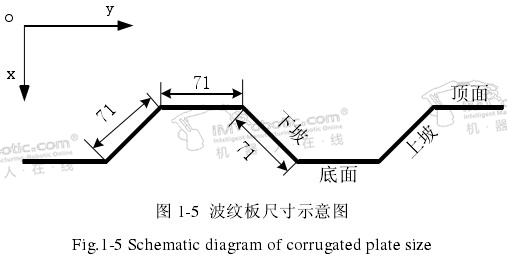
波纹板广泛应用于集装箱、工业厂房、展厅屋顶等。提高波纹板焊接自动化的关键是波纹板折线焊缝的跟踪。如图1-5所示是波纹板尺寸示意图,用于波纹板折线焊缝采集的传感器主要有激光测距传感器、超声传感器、旋转电弧传感器以及力学传感器、激光与超声复合传感器等。
河海大学田松亚等人采用超声波传感器,跟踪波纹板一个波纹周期,实现从固定起始点重复跟踪折弯位置的目的。张根元等人利用激光测距传感器跟踪折线焊缝,设计空间漫反射激光测距传感器检测波纹板的折弯位置,利用可在波纹板折线位置处改变焊枪角度的四自由度直线轨道式焊接机器人进行焊缝跟踪。陈丽华等开发了超声与激光复合检测系统,该系统由激光传感器和高精度超声波传感器构成,在平直段采用超声波传感器测距,而折线处对两个传感器采集到的信号进行数据融合,做出决策,控制焊枪姿态的改变,达到连续自动焊接。南昌大学采用可转动焊接小车机构配合旋转电弧传感器对波纹板折线焊缝进行跟踪,将旋转电弧传感器检测得到的偏差信号输入到十字滑块控制器中,控制十字滑块动作,实现焊缝的快速跟踪。超声传感器具有不受弧光和强电磁干扰性价比高、可穿透烟尘等优点,但存在容易受到环境的噪声干扰,并且斜边处会有部分超声波发生散射而使得检测信号不断跳变的缺点;激光测距传感器结构较复杂,造价较高,受弧光和烟尘干扰;旋转电弧传感器存在控制器设计困难,结构复杂的缺点。本文采用激光双目视觉采集波纹板折线焊缝,采集精度高,系统的抗干扰能力强,结构设计简单。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









