





焊接机器人与计算机串口通信的工作流程
时间:2017-11-03
阅读:10770


焊接机器人与计算机串口通信的工作流程
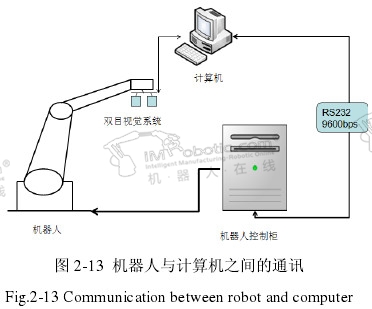
在波纹板焊缝获取的试验过程中,机器人在运行过程中涉及通讯和运动控制两个并行任务过程。通过Multitasking多任务软件,编写多任务程序完成当前机器人的位置、姿态读取并与计算机通讯以及控制机器人运动的任务。建立并行任务时,通过声明为PERS C persistent变量)的变量来实现不同任务对同一变量的操作。ABB机器人系统提供软件接口供主控计算机读取机器人的当前位姿,本文使用的软件接口为基坐标系下的位姿。ABB机器人系统为用户提供基于RS232C协议的串行口以及基于RAP(RobotApplication Protocol机器人应用协议)的以太网通信[48]。如图2-13所示,本文所搭建的焊缝三维检测及重建系统,机器人与计算机的通信方式采用的是基于RS232C协议的串口通信。
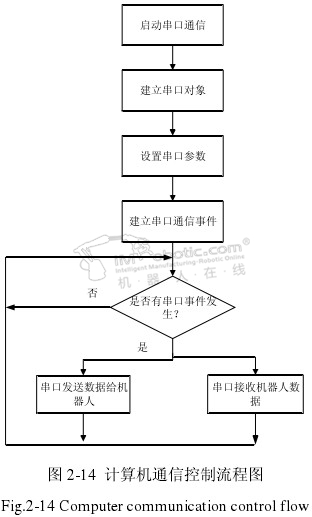
在主控计算机系统设计的通信程序结构和串口操作的工作流程如图2-14所示。根据串口通信协议,将机器人的串口2 (com2)设定为:波特率9600bit/s, 8位数据、1位停止位、无奇偶校验位。点击主菜单的“机器人通信”选项中的“连接机器人”。启动串口通信线程,函数“CreateFile”建立串口对象,将串口读写工作方式设为重叠I/O方式。通信线程检测到串口写事件(串口发送数据给机器人),通信线程执行写串口操作,将数据加入计算机串口发送数据缓冲区,发送给机器人控制系统。当通信线程检测到读串口事件(串口接收机器人发送的数据)时,将收到的数据拷贝到计算机接收机器人数据区,并立即向主线程发送WM_COMM_RXCHAR消息,由主线程消息响应函数进行处理。点击主菜单的“机器人通信”选项中的“断开机器人”,关闭通信线程。
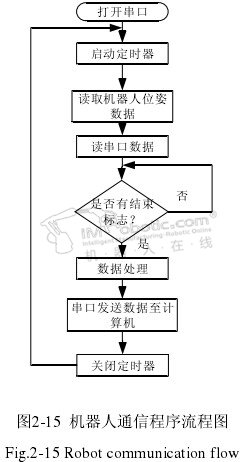
在机器人控制系统中创建并行的后台任务,实现机器人通信。机器人与计算机串口通信的工作流程如图2-15所示。
机器人通信主要包括:
1) Open "COM2:", channell}Bin;打开串口指令。参数“COM2”说明要打开类型为串口2, channell为串口2的名称,参数“Bin”表示以二进制模式进行文件读、写。
2 ) WriteStrBin channell,"&"+ValtoStr(pBase);为机器人通过串口向计算机发送数据的指令。channel l为要进行写操作设备的名称,“&”表示结束标志符号,要发送的字符串“pBase”包含了机器人的位置、姿态信息,用WriteStrBin指令发送至计算机系统。
3 ) Close channel1;串口关闭指令。
硬件连接完毕并设置好相关参数后,即可建立机器人控制器和计算机之间的通讯。本文以VC 6.0作为软件平台,将相应的头文件、静态库和动态库导入到程序中,通过调用字符串解析函数即可进行数据传输操作。
本章主要介绍搭建的激光结构光波纹板焊缝三维检测及重建系统的软硬件设计方案。以ABB公司的IRB 140型机器人作为执行机构,在其末端安装双目立体视觉传感系统进行波纹板焊缝的采集。在主控计算机设计了图像采集与处理,计算机与机器人串口通讯,波纹板三维焊缝轨迹实时采集与重建的软件系统。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









