





焊接机器人视觉关系的标定
时间:2017-11-03
阅读:8591

焊接机器人视觉关系的标定
1 双目视觉测量的数学模型
如图3-6所示,双目立体视觉系统采用两台不同角度换个位置安装的摄像机模拟人的眼睛功能获取三维空间物体的几何信息。主要利用两台摄像机同时对空间物体进行拍照,基于空间点在两台摄像机成像平面上的投影点坐标进行特征匹配,求取空间点在世界坐标系中的三维坐标。单目视觉只能获得被拍摄物体的平面信息,无法获取其空间点的具体深度;双目视觉对空间点进行观察,则空间点P的位置是唯一确定的。该点位于射线O1P和O2P的交点上。取世界坐标系Ow-XWYWZW与左摄像机的坐标系重合。我们用矩阵M1和M2分别表示左右两个摄像机的这种对应关系,由前述摄像机的透视变换模型可以得到空间点P在左右摄像机坐标系的坐标表示,分别见公式(3-8 ) , (3-9)
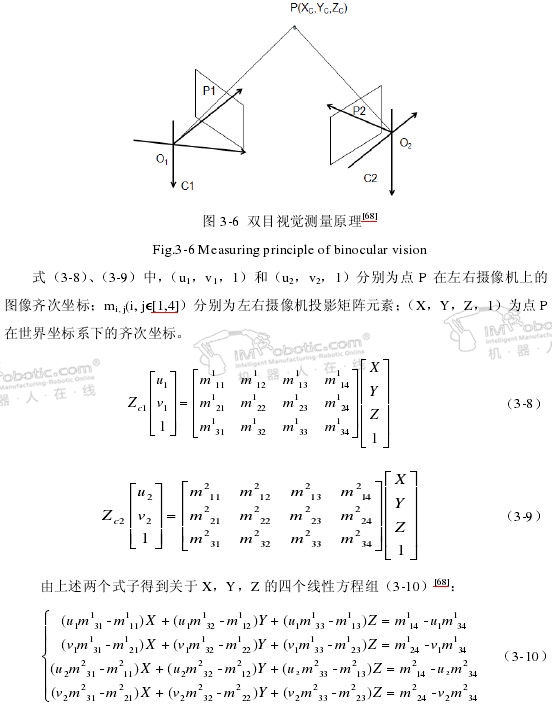
解上述方程组得到空间一点P (X, Y, Z).
机器人手眼关系标定
将双目视觉传感系统安装在机器人末端执行器上是实现主动视觉的重要方法。因为机器人末端执行器具有良好的自由度,可以灵活方便配置传感器位置,测定末端执行器与目标物的相对位置。机器人手眼标定是为获得摄像机坐标系相对于机器人末端执行器的坐标转换关系。求解手眼标定方程的方法主要有两种:两步法和单步法。单步法同时对机器人运动学模型参数以及手眼标定参数进行全局的非线性优化,可同时求得手眼关系的旋转部分和平移部分。单步法虽然不存在误差传递问题,但这种方法因为大量的非线性优化使求解过程非常耗时,要求较为准确的初始值估计。两步法是将标定方程分解,首先求解旋转部分,然后利用旋转部分的结果求解平移部分。该方法不用求解非线性方程,但存在误差传递问题。本文采用两步法进行机器人的手眼关系的标定,充分利用图像标定提供的冗余信息提高标定的精度
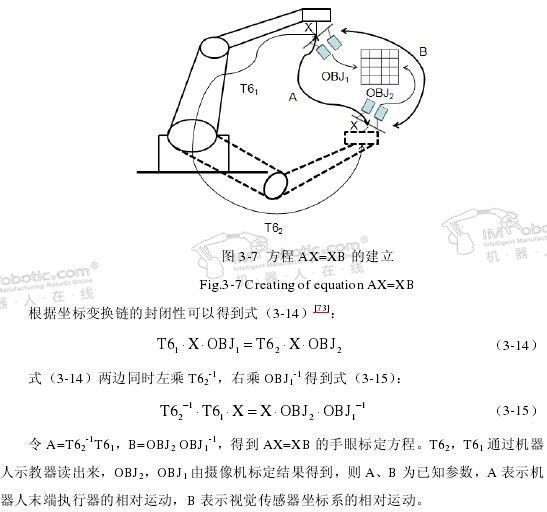
1 手眼标定方程AX=XB的建立
如图3-7所示,控制机器人末端执行器在相邻两次运动时末端执行器坐标系之间的关系A以及视觉传感器坐标系之间的关系B为已知量,手眼标定关系简化为AX=XB形式的方程,推导出摄像机相对于末端执行器的旋转矩阵Rx和平移矩阵Px
2 两步法求解手眼标定方程
在实际工程应用中,直接利用线性方法求解上述手眼标定方程往往得到多解而且十分耗时。本文应用齐次坐标变换矩阵,通过两步法求解方程AX=XB。把方程的齐次变换矩阵分解为旋转和平移两部分展开得到式(3-16)

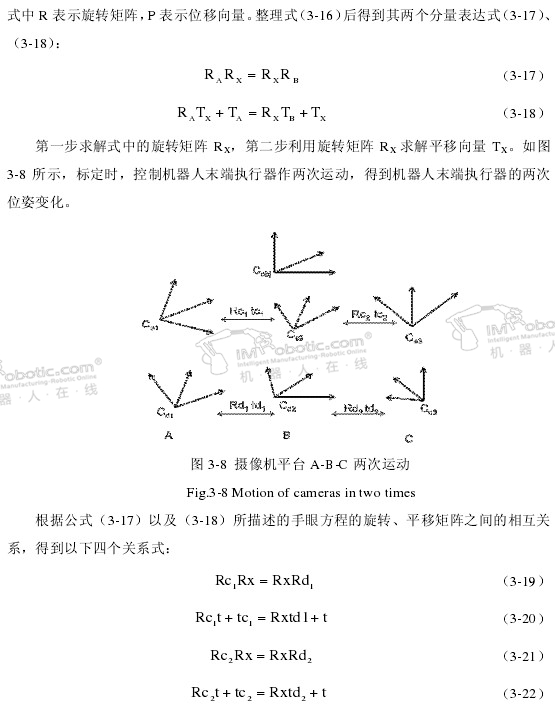
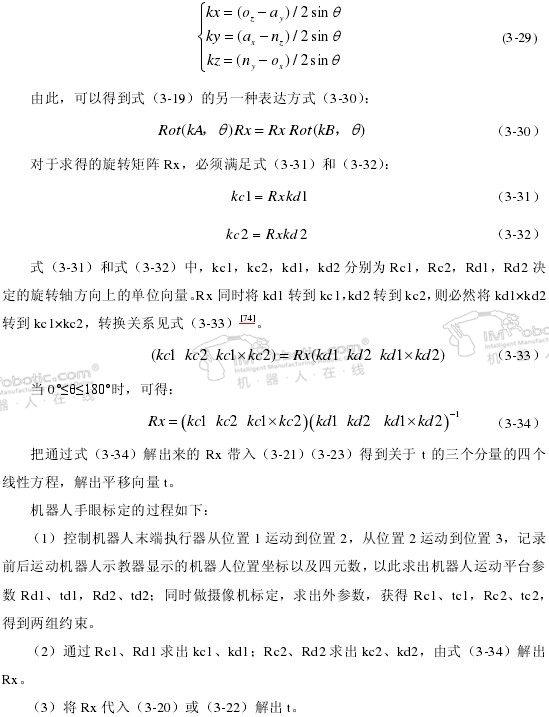
其中,Rcl, tcl, Rc2, tc2分别表示两次摄像机运动的参数,由通过摄像机标定得到的外参数确定;Rdl, tdl, Rd2, td2表示机器人末端执行器两次运动的参数,由ABB机器人示教器中读出的四元数转换得到;联立方程(3-19), (3-21)解得Rx, Rx带入式(3-20)或式(3-22)解出t。
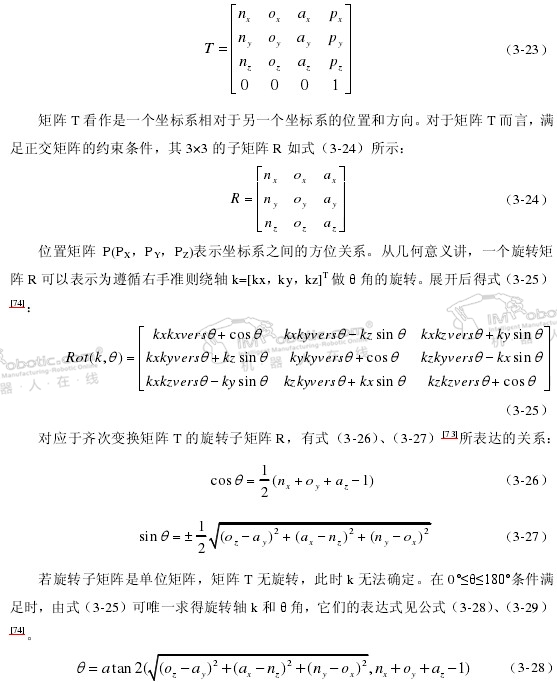
3 齐次坐标变换矩阵与绕任意轴的旋转矩阵关系
齐次坐标变换矩阵的元素通常表示为式(3-23)所示的形式:

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









