





焊接机器人轨迹规划及各关节轨迹生成
时间:2017-11-08
阅读:15198

笛卡尔空间的PR1400焊接机器人轨迹规划及各关节轨迹生成
PR 1400焊接机器人,在进行连续弧焊作业时,要保证焊枪末端轨迹的准确定义,就必须在笛卡尔空间进行轨迹规划。并把规划的路径差分为有限多个过渡点,通过逆运动学求解,时时转换为每个关节的角度值。
本文中主要研究,PR1400焊接机器人在笛卡儿空间中的直线轨迹规划和圆弧轨迹规划这两种运行轨迹方式。
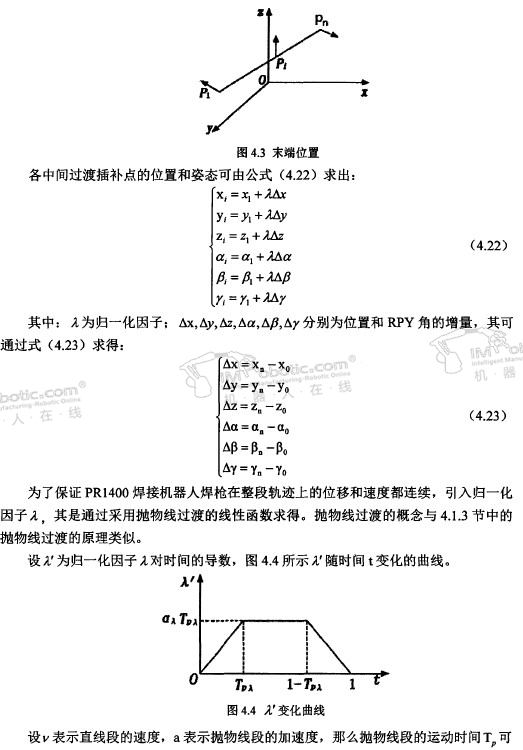
1基于笛卡尔空间的PR1400焊接机器人的直线轨迹规划
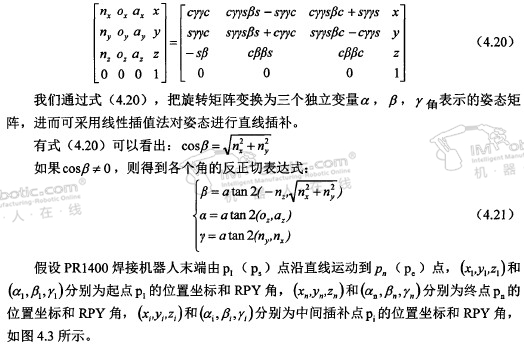
前文用齐次变换矩阵表示PR1400焊接机器人连杆之间的位姿变换。齐次变换矩阵可以分为两部分:旋转矩阵和位置矩阵。由于旋转矩阵中的各元素并不独立,所以不能直接对其进行线性插值,而位置矩阵的三个元素是独立的,可以对位置直接进行线性插值。所以这里用前面介绍的RPY角表示法,来表示PR 1400焊接机器人的齐次变换矩阵中的旋转矩阵部分,因为RPY角的三个变量是独立的,可以对其直接进行线性插值。
式(4.20 )是用RPY角表示的PR1400焊接机器人连杆坐标系之间旋转变换的,齐次变换矩阵:

2基于笛卡尔空间的PR1400焊接机器人的圆弧轨迹规划
4.2.1节中介绍了PR1400焊接机器人笛卡尔空间的直线轨迹规划。但是,在实际PR1400机器人焊接过程中,焊接轨迹并不都是直线的,也可能是圆弧轨迹,因此本章将介绍笛卡尔空间的圆弧轨迹规划。当焊接轨迹是更一般的情况时,既不是标准的直线或圆弧轨迹,而是复杂的不规则轨迹时,我们可以通过直线和圆弧的分段拟合来近似得到。
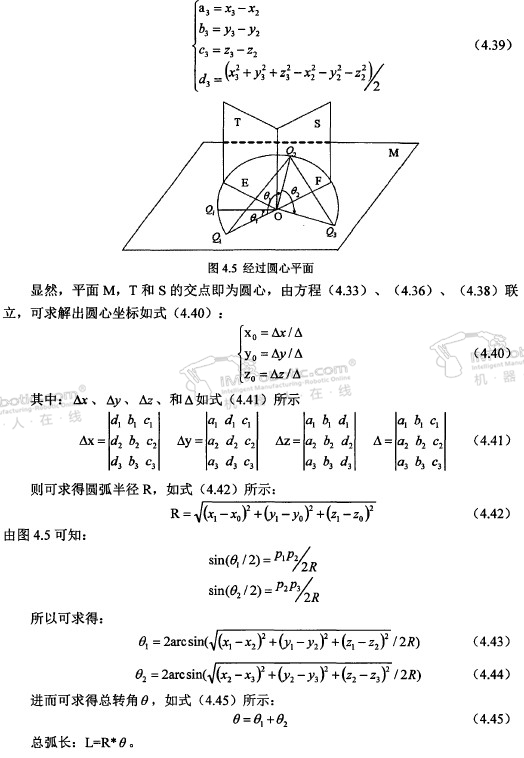
由数学的理论知识我们知道,不在同一直线上的任意三点可以唯一的确定一个圆。当需要机器人末端完成一段圆弧轨迹时,只需示教3个点,即可得到一段圆弧轨迹。但是我们知道,PR1400焊接机器人在焊接过程中是在三维空间作业的,而不仅仅是在二维平面内。因此,我们在进行圆弧轨迹规划时要把确定圆的空间3个点,首先转换在一个二维平面内,然后采用二维平面的圆弧插补算法,进行圆弧轨迹规划,最后再把插补点的坐标转换到基坐标系下。
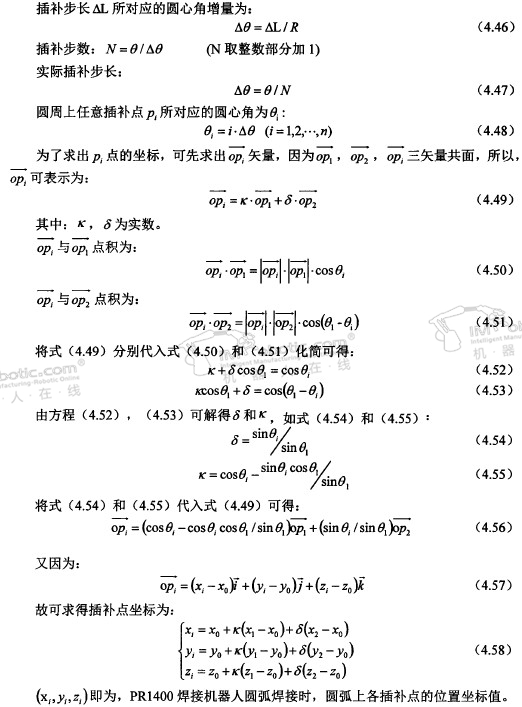
1圆弧的位置插补

2圆弧的姿态插补
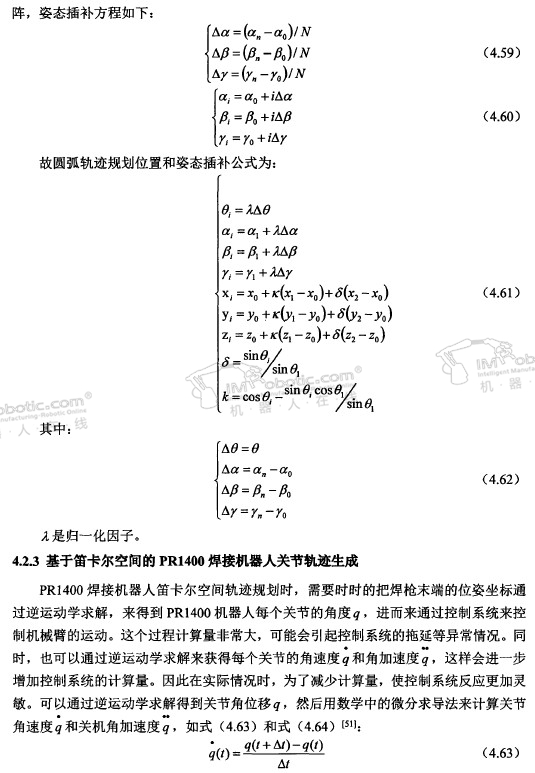
圆弧的姿态插补仍采用,直线姿态插补所采用的方法,即用RPY角表示的姿态矩阵,姿态插补方程如下:

本章运用三次多项式插值、高阶多项式插值和抛物线过渡的线性插值在关节空间对PR1400焊接机器人轨迹进行了规划,和在笛卡尔空间对PR1400焊接机器人进行了直线轨迹和圆弧轨迹规划。并介绍了一种笛卡尔空间的PR1400焊接机器人的关节轨迹生成方法。这些插补算法是针对不同焊接任务要求的,因此可根据具体的焊接需求来进行合理的选择,力求顺利的完成焊接任务。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









