





基于MATLAB的焊接机器人运动轨迹仿真
时间:2017-11-08
阅读:13181

3基于MATLAB的PR1400机器人笛卡尔空间的关节轨迹仿真
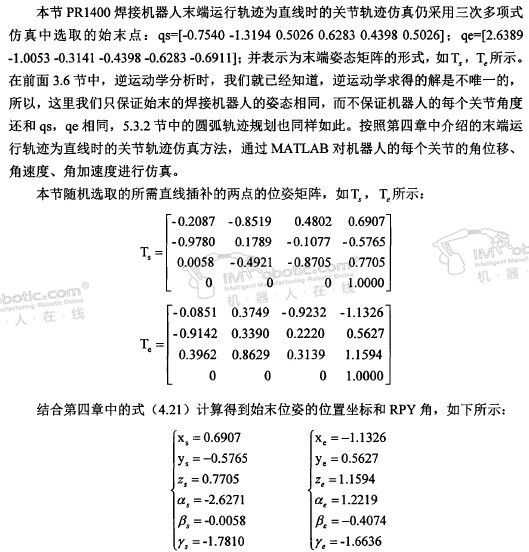
1 PR1400焊接机器人末端运行轨迹为直线时的关节运行轨迹仿真
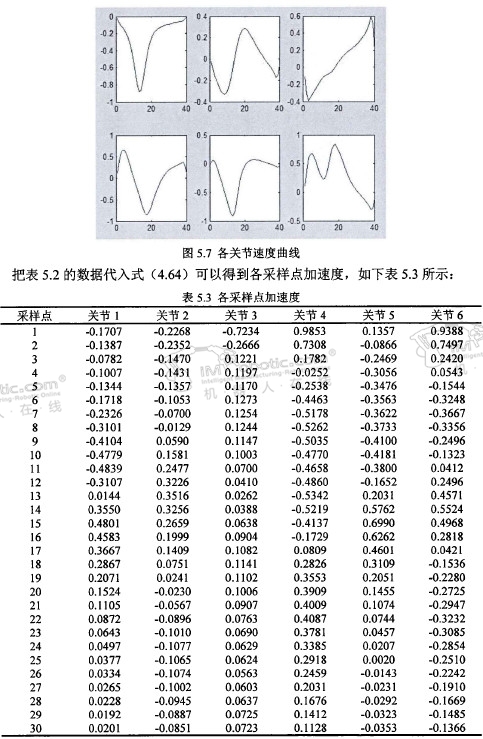
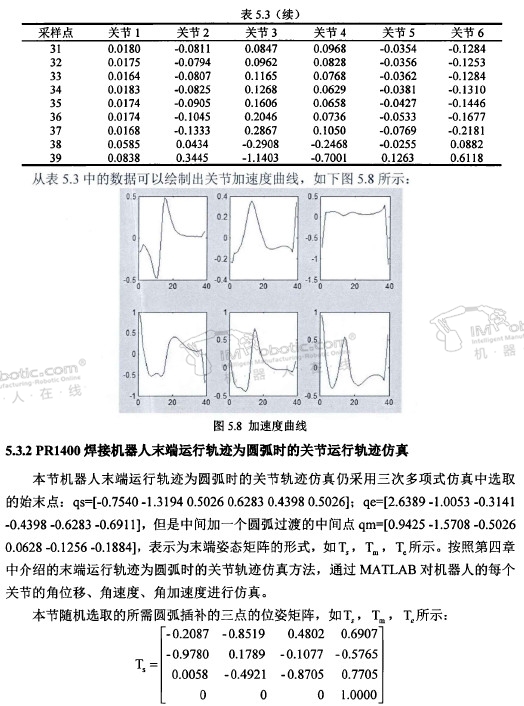
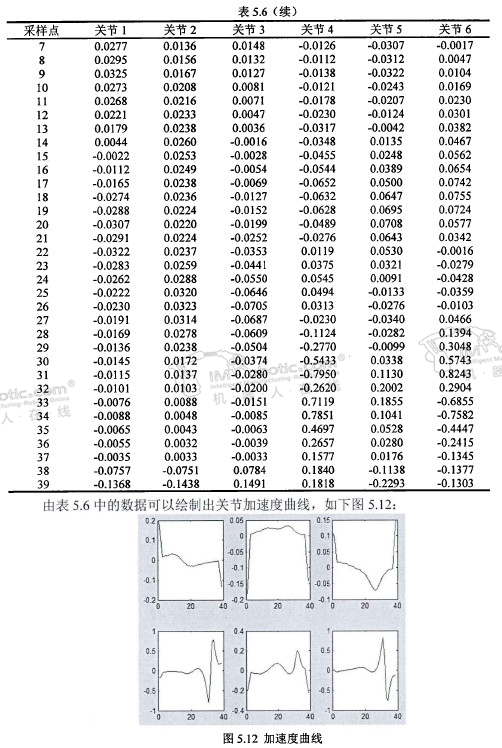
分析图5.8和图5.12的加速度曲线可以看出,加速度在关节启动和停止时存在突变,在运动过程中基本保持不变。进一步分析可知,机械臂在关节启动和停车时受力存在突变,在运动过程中受力很小或不受力,保持关节平稳运转。
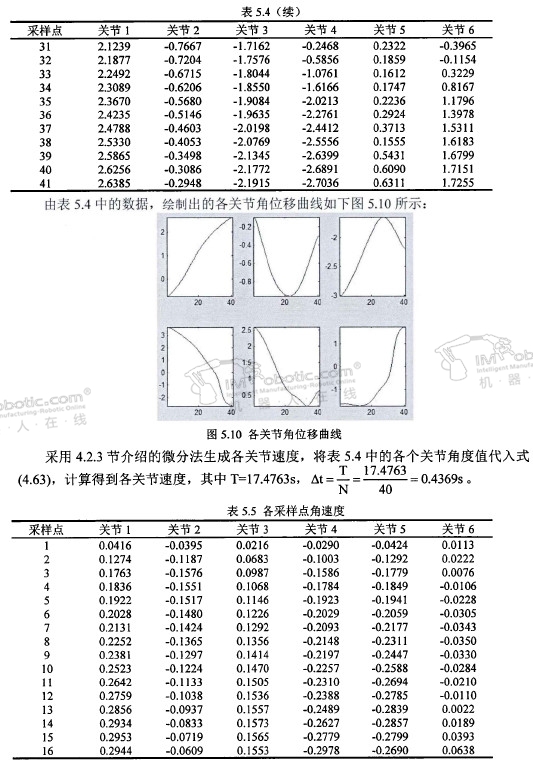
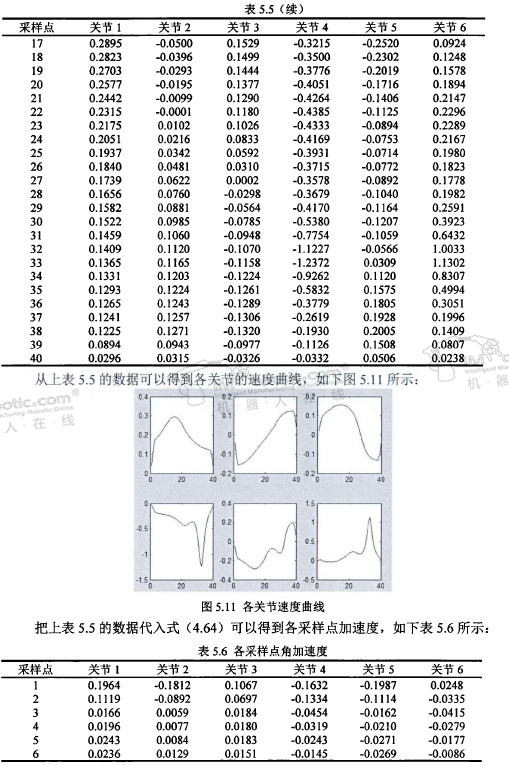
本章在MATLAB中建立了PR 1400焊接机器人的模型。分别在关节空间对PR1400焊接机器人三次多项式插值、高次多项式插值、抛物线过渡的线性插值的轨迹进行了关节轨迹仿真,在笛卡尔空间对PR1400焊接机器人直线轨迹规划和圆弧轨迹规划的轨迹进行了关节轨迹仿真。从仿真结果来看,关节空间轨迹规划的关节变量、速度及加速度曲线光滑、连续,从而减少了PR1400焊接机器人关节运动中的冲击与振动,保证PR1400平稳运行。笛卡尔空间轨迹规划优点是概念直观,便于理解,但是存在PR1400焊接机器人关节变量、速度及加速度曲线部分突变,不连续的情况,会引起PR 1400焊接机器人运行的不稳定,这是由于我们为了保证PR1400机器人末端运行姿态满足焊接工艺要求所造成的,引起振动也是不可避免的。因此,对于那些无路径要求的焊接作业,才能在关节空间直接进行轨迹规划,此方法能保证PR1400机器人运行平稳无冲击。而对于那些路径、姿态两者的瞬时变化规律要求严格的作业,如连续弧焊作业,就必须在直角空间进行轨迹规划,然后再将规划的轨迹分成有限多个中间过渡点,逐点地返回到关节空间,得到需要控制的关节变量,再进行关节变量的控制,但是这种规划方法会引起PR1400机器人在运行过程中的振动与冲击。所以,需根据具体焊接任务来选择PR1400焊接机器人的轨迹规划方法。
机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
13

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









