





焊接机器人大臂结构的拓扑优化
时间:2017-11-10
阅读:8151

焊接机器人大臂结构的拓扑优化
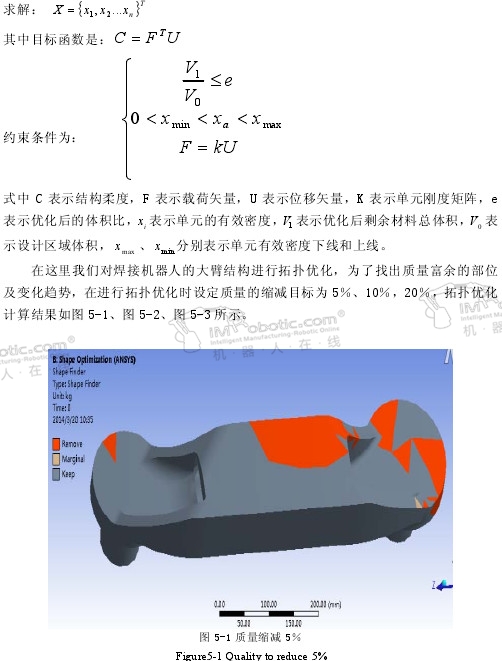
根据前文焊接机器人大臂的模态分析发现:大臂上部是固有频率较大的部位,因此需对该处结构进行加强,但是单纯的改进会引起质量的增加,是不符合轻量化要求的;所以在考虑焊接机器人轻量化的前提下,运用拓扑优化分析找出的质量富余部位并将该部位质量转移到刚度较弱位置的方案是较为合理的。
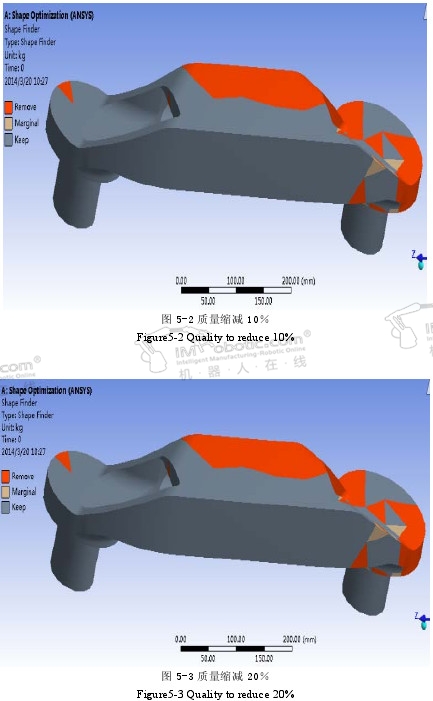
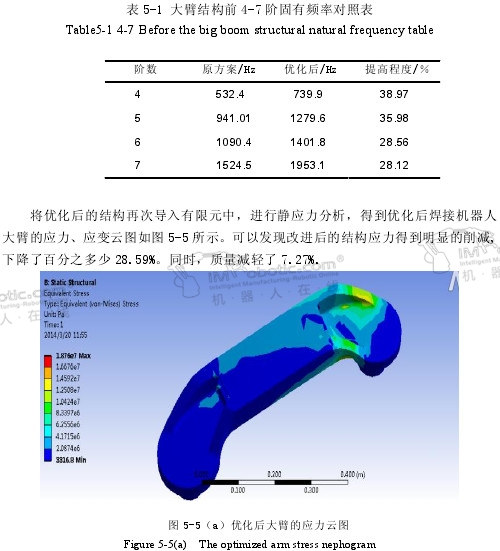
焊接机器人大臂结构的拓扑优化是指形状优化,它是以寻找承受单载荷或多载荷物体的最佳材料分配方案为目标的拓扑优化方法。这种方案在拓扑优化中体现的是“最大刚度”的优化设计,拓扑优化与传统优化设计的区别就是不需要给出参数和优化变量的定义。本文采用的大臂的拓扑优化数学模型是:
大臂结构的优化设计方案
通过通过对大臂的静力学分析可知大臂上面部分容易出现变形,可以在穿线槽上表面增加一根加强筋以增强刚度,通过拓扑优化云图分析可知,大臂装线孔前的板有较多的质量富余,可以适当剔除。结合实际加工情况,提出改进方案:
(1)在大臂穿线槽上表面增加一条加强筋;
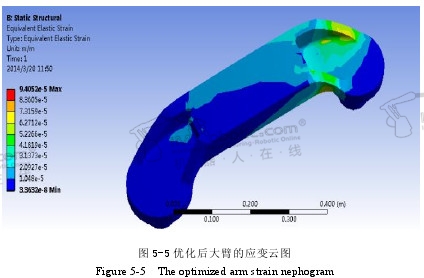
(2)在大臂端头剔除部分材料,大臂的具体结构优化,如图5-4所示。通过计算得知优化后结构的质量相比原有结构降低7.27%

大臂结构的优化效果验证
将优化后的大臂结构导入有限元分析软件中,对其模态进行计算,计算结果如表5-1所示。动刚度和固有频率二次方成正比例关系,因此大臂的刚度变化可以通过固有频率来验证。通过将改进前的前4-7阶固有频率与改进后的前4-7阶固有频率对比,可以发现改进后结构的刚度得到明显的提升。
小结
本章通过对焊接机器人大臂进行拓扑优化分析基础上,提出了相应的大臂结构优化设计方法,并进行了相应的优化效果验证,得到的结论如下:
(1)通过优化使得焊接机器人大臂结构的固有频率平均提高32. 91,折合刚度提高了10. 83。改进后的焊接机器人经过实际生产发现其动态性能明显提高。
(2)通过优化使得焊接机器人的大臂的应力削减了28. 59%,质量减轻了7. 27%

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









