





焊接机器人整机结构建模与静力分析
时间:2017-11-16
阅读:8622

焊接机器人整机结构建模与静力分析
在前文中对焊机机器人的大臂等关键部件进行了模态分析,得到了其固有振型。但是机器人的本体结构是由多个部件连接组成,在实际工作时,不仅部件之间有可能发生共振,部件与整体之间也有发生共振的可能。同时,对机器人整机进行模态分析也有利于确定整个系统的薄弱环节以及主振部件,为后续的结构优化提供建议。
PR1400焊接机器人整机建模
在对机器人整体建模时,为了减少计算量,对于挡板等一些不必要的结构进行了简化。将焊接机器人中没有相对运动的部件视为一体,例如将RV减速器与伺服电机视为一体并用采用“Point Mass”来代替,"Point Mass”的位置即为其质心,具体坐标可在SolidWorks中获得。设置各个部件接触面的结合,添加腰座与地面的固定约束。最终PR1400型焊接机器人整机边界设置如图3. 26所示:
.jpg)
PR1400焊接机器人整机静力分析
与各部件的有限元分析过程相似,步骤如下:
(1)对各部件材料进行设定,大臂、小臂等部件为ZL 104,其余部件为45钢;
(2)网格划分时,由于整机划分结构复杂,采用自动划分网格,得到964586个单元,1654429个节点;
(3)施加边界条件,整机由众多零件组成,零件之间为“Bonded”接触,重力加速度为-y方向,腰座与地面固定约束;
(4)进行分析求解。
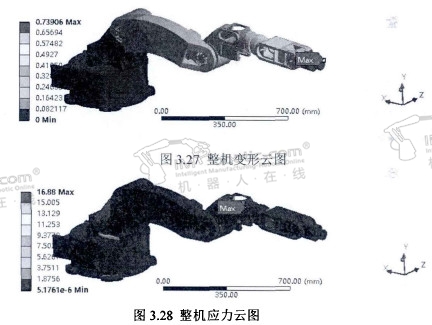
PR 1400型焊接机器人整机在额定负载下的变形总变形云图如图3.27所示,最大变形为0.73906mm。如图3.28所示为机器人的应力云图,可得最大应力值为16.88MPa,在肩关节处。其中ZL 104的屈服强度220MPa, 45钢的屈服强度为355MPa。由静力分析的结果可以看出机器人整体的结构强度十分充裕。
PR1400焊接机器人整机模态分析
各部件的固有特性对整机结构的动态特性具有决定性的影响,前面己对主要部件进行了模态分析,得到了其各部件前六阶固有频率。但仍有必要对机器人整机进行模态分析,得到整机固有频率。
PR 1400型焊接机器人为六自由度机器人,可以用6个广义坐标表示。因此,其前六阶模态便可清楚描述系统动态特性。由于在焊接机器人的工作过程中位姿具有复杂的变化,所以选取机器人的危险位姿比较具有代表性。因此进行整机模态分析前,应该将其调整到危险姿态。整机固有频率及关键部件前六阶固有频率如表3. 10所示。
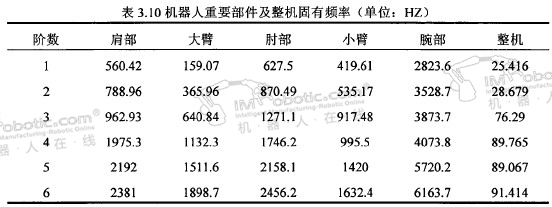
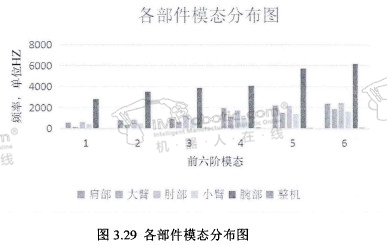
为了直观表现出各零部件之间的模态关系,根据表中数据,绘制各部件模态分布图,如图3. 29所示。从图3. 30中可以看出,虽然也存在个别零件的固有频率数值比较相近。如肩部与肘部的1, 2阶固有频率相近,大臂的4阶固有频率与肘部的3阶固有频率相近。如果相互连接的零件固有频率相近存在发生共振的可能,但肩部与肘部并不相连,而大臂与肘部同阶固有频率并不相近。而且经过进一步观察,以上零件的固有频率虽然相近,但振型不同,故不会发生局部共振。
本章在上一章ADAMS分析的基础上,将得到的力、力矩数值作为各部件有限元分析的边界条件,对PR 1400型焊接机器人的大臂、小臂、肘部、腰座等关键部件进行了静力学分析与模态分析,获得了各关键部件的应力、变形云图以及固有频率。同时以大臂为例,对部件预应力情况下的固有频率变化进行了详细分析。本章还研究现有结构是否存在共振的问题,对整机进行了静力学、模态分析,获得整机固有频率,研究结果说明现有结构不存在共振问题。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









