





焊接机器人应力应变实验说明
时间:2017-11-16
阅读:8077

焊接机器人应力应变实验说明
1 实验器材
若干应变片、导线、计算机、静态电阻应变仪、数字万用表、502胶水、砂布、胶带。
2 实验方法
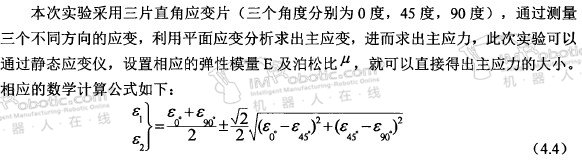
本次实验取PR 1400焊接机器人6个典型姿态下的应力应变进行测量,每个姿态重复测量5次取平均值,最终得到6组测量数据。将实验采集的6组数据与有限元模型在对应姿态下的应力应变数据进行对比,得出两者对比曲线与误差百分比。

根据有限元分析结果以及机器人的实际结构,最终选定7个测量点,而每个测量点有3个方向,因此选用的静态应变仪测试系统至少要具有21个通道,通过比较最终选用DH3821静态应变测试分析系统。DH3821静态应变采用全智能化的巡回数据采集系统,具有通道自检功能。本次实验采用2个采集模块,每个采集模块有16个通道,总共32个通道满足实验需要。
DH3821静态应变测试系统具有以下优点:
(1)可以对数据进行实时采样、传送、存盘、显示;
(2)具有先进的隔离措施,抗干扰能力强;
(3)可以对导线电阻进行测量并自动修正;
(4)桥路自检功能,方便实验现场状态检查和故障排除;
(5)根据预定义模版自动设置测点参数,后台计算后直接给出所需数据。
DH3821静态应变测试系统的基本参数如下表所示:

3 静态应力应变实验步骤
(1)选定应变片测量点。根据有限元分析结果并结合实际结构特点,最终选定7个测量点。每个测量点的分布情况如下面图所示:
①肩部布线点
.jpg)
肩部A点是应力比较大的地方,B点选在与A对称处,且考虑粘贴应变片所需空间,因此在A, B两点贴上应变片。A点位置:横向位置为肩部与大臂连接孔中心70mm,纵向位置距离肩部底面267.91mino B点位置:与A向对称的肩部右侧。
②大臂布线点

A点是大臂侧面的点,处于大臂两个面过渡位置,较易产生应力集中。B点位于大臂上表面,表面平整,易于贴片。A点位置:A点在两个面相交所产生的直线处,距离右端67.88mm。
③肘部布线点

如图4.5所示,A点位于肘部与大臂相连的孔壁上。A点位置:A点位于外部孔壁且与孔圆心同平面。
④小臂布线点
小臂布线点为小臂与三角连接孔之间的曲面上,如图4.6A点所示,A点为左侧连接孔,B点为右侧连接孔。A点位置:图示小臂左侧连接孔平面与圆弧面过渡线1/2处。B点位置:位于与A对称的位置。
(2)测量点表面处理,粘贴应变片。由于应变片需要粘贴在平滑的金属表面,首先用磨光机对其表面进行去漆处理,然后用砂纸进行打磨,使零件表面光洁平滑
(3)进行软件设置,采集数据。在静态应变仪中设置好数据采集通道,设置数据采集频率为2Hz,零件弹性模量E为70000MPa,泊松比刀为0.32。当应变片产生变形,通过静态应变仪的采集与计算,得到测量点应力应变。
(4)重复测量,消除随机误差。对同一姿态进行5次测量,取5次测量结果的平均数为最终结果。当焊接机器人变换姿态后再一次进行重复测量,得到其各个不同姿态下的应力应变。
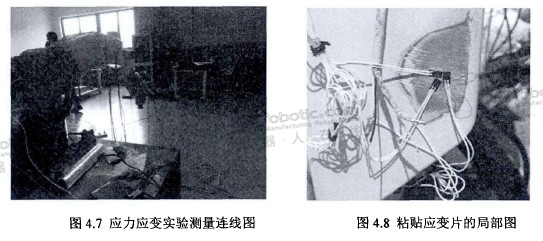
整个实验连线图与应变片粘贴的局部图如图所示:

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









