





相贯线焊接机器人参数管理、故障处理模块
时间:2017-11-22
阅读:8162

4参数管理模块
数字化焊接车间是未来几年焊接领域的发展方向,而数字化焊接车间的一个重要表现就是参数的管理和远程监控。在焊接领域中,焊接参数是影响焊接效率和焊接质量的重要因素,在生产加工、科学研究以及质量评定中,都需要通过对焊接参数的分析得出相应的结论。对焊接过程中机器人运动参数的管理可以实现机器人运动的远程模拟,实时地监测焊接机器人的运动状况,有效地防止机器人运动故障。所以,对焊接机器人在焊接中各种参数的管理不仅可以提高工厂的管理效率,而且可以提高产品质量稳定性,在生产故障可追溯性方面也有了很大程度的提升。
参数管理模块的目的就是将焊接过程中的焊接参数以及机器人运动参数连同焊工信息一并通过无线网络发送给远端控制计算机,从而让远端计算机能够实现焊接监控、运动轨迹仿真和焊接过程追溯等功能。其过程示意图如图3-5所示。

5故障处理模块
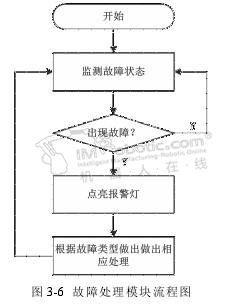
故障处理模块的主要功能为实时监测机器人焊前以及焊接中是否存在故障,并且根据故障类型做出相应的应急处理。可能遇到的故障类型主要有数据采集卡故障、运动控制器故障、驱动器及电机故障、焊接故障等。由于故障出现的随机性,需要一个线程自始至终监控机器人故障状态。
具体实现过程如下:设置一个定时器OnTimer,每隔100ms监测机器人是否产生故障,如果产生故障,则点亮控制箱上的报警灯,并根据故障类型采取不同的故障处理措施,故障处理完成后熄灭报警灯;如果没有出现故障则继续监测。模块流程图如图3-6所示。
(1)通过对系统软件需求的分析,设计出软件总体结构框架,并将软件功能模块化处理,主要分为状态监测模块、轨迹计算模块、运动控制模块、参数管理模块以及故障处理模块等几个模块。
(2)分析了软件不同模块的主要作用,并且通过C++编程实现各模块相应的功能。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









