





焊接机器人视觉识别系统中摄像机的三种标定方法
时间:2017-11-24
阅读:8398

焊接机器人视觉识别系统中摄像机的三种标定方法
目前对摄像机标定方法的研究已经相当成熟,摄像机标定方法可分为传统标定法、自标定法和主动视觉标定法三种。
传统的标定方法需要借助特定的立体靶标,靶标上的特征点的相对位置关系是己知的,采集这些特征点的图像坐标和空间坐标后建立方程组,通过求解方程组获取摄像机的内外参数。传统的标定方法标定过程简单,标定精度高,鲁棒性强,因此得到广发的应用。但在实际应用中,很多情况是不允许在环境中放置特定的靶标的,因此需要用到无须靶标的自动标定法,这种方法无须借助任何的特定的标定无,而是通过对同一场景拍摄多幅图像,从中获取特定的信息来获取摄像机的内外参数。这一技术也是目前摄像机标定技术研究的热点。自动视觉的标定方法是通过主动地控制摄像机做一些特定的运动,然后根据摄像机在不同位姿拍摄的图像所包含的线性信息求解摄像机的内外参数。这种标定方法的计算比较简单,鲁棒性也强。但是需要一个高精度的控制平台去控制摄像机做特定的运动,这大大增加了摄像机的标定成本。
综上所述,本文考虑标定过程的简便性和标定成本,采用8×8、大小为20mm×20mm的打印棋盘格,并使用基于“两步法”的传统摄像机标定方法来对摄像机参数进行求解。
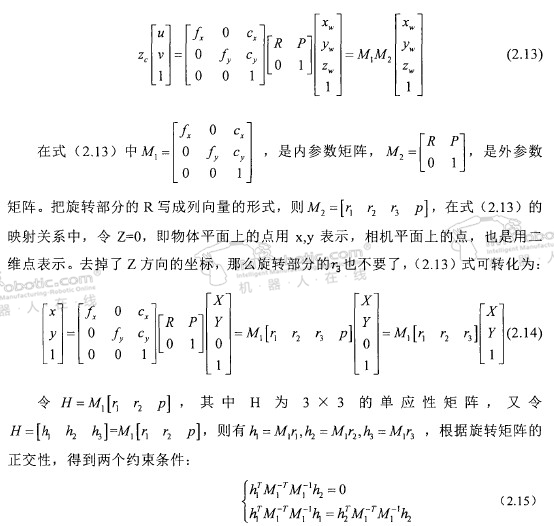
前面己介绍了摄像机的标定模型,建立的景物点在世界坐标系与图像坐标系的映射关系与式(2.13)所示:

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









